Bill, I looked at PIDP and compared P, I & D gain. Indeed the I term is far lower than the P term. The scaling for the graph goes from .05 .15 with P term and when I look at I it is .0005 to .0015. Is this normal? With such scaling differences I cannot find a way to compare them as the I term fades into a flat line against the P term graphing.
Should I go higher with the ILMI maybe? As I said, I am only at .07 at the moment.
Tim
I don’t understand why the I term is so much smaller than the P term yet it seems like the I term is making a significant contribution. If you don’t see any clipping in the I term then ILMI is high enough.
Are we doing a complete retune now on what was a nice flying helicopter? I believe I mentioned some time back that the autopilot does NOT like the Rate PID loop running at 4 Hz. If it was me I’d set everything back to where you had it and speed that up to at least 10. It doesn’t matter if you find it out in Loiter or Auto, but the autopilot needs faster response than that or it just won’t work.
Sorry, but BTDT.
Hi Bill.
You remember me? We were in contact few month ago. I fly the TR 700E with the 3 bladed Align head and tail.
I have shifted house and have not flown since Jan. 2017. With my reply here I would like to thank you and Chris Olson, but mostly Tim Bacon for this thread called “This should be interesting”. And it is extremely interesting, guys!!
Tim with his high experience as a 3D RC Heli pilot starting now using the new Pixhawk, has so many questions as a beginner with the autopilot firmware.
This tread is worth more than any wiki reading for tuning a Helicopter with the Pixhawk for a starter.
I know because it took me several years to get that far to use my TR700 as a video-photo platform. For testing I also use a 500 class Heli ( RJX520) which crashed during testing in January a day before moving house.
My Helis were flying extremely nice with the Arducopter vers.3.3.3 which was made so good by the master Robert Lefebvre. His setup video on Youtube has helped a lot of starters earlier.
Tim and others.
I just want to let you know my biggest problem for me was at the end to get the video quality usable. I have tried several gimbals, many, many rubber balls.Nothing was really good enough for me, with a Heli.
I must say as a Photogrammetrist, now retired, I am used to Aerial photography. I made an income with that for 45 years in 2 countries.
What really worked for me are high tensile wires at the corners of the two top plates of the gimbal. A guy who showed his design on YouTube inspired me to test that system. I build it myself for both Helis.
Only my Quad copter has rubber balls which are working very good.
Sorry for interrupting your interesting talk.
BSW: Are you all retired. Your replies are come in every day all day. Thanks a lot for that!!!
Chris,
I guess after that ossicilation in loiter this morning, ive been revisiting things. I have the parameter file saved with those settings should I need to revert back to them. I think this has been an attempt to get desired and actual to co.e a bit closer together. Aside from adding the ILMI, everything else is just a few points from where it was.
This evening’s last 2 flights felt quite good. I am on board with trying it at 10hz, worst it will do is ossicilate like it did the first couple flights i guess?
Tim
You got an oscillation? The last params I looked at, I thought the P gains were a little soft for a big helicopter. But you had the feedforward turned up pretty good, which works. But I know from tuning for auto flights that having the filter param set that low makes the helicopter fly so sluggish that the autopilot can’t keep it on the ground track. From my experience with that, I really don’t think you as the human pilot will see any difference. But the autopilot will because it makes way faster and more accurate corrections than you do.
Usually, an oscillation with these things results in a totally uncontrollable helicopter. And you do not want to be doing it at more than about 6" above the ground, but once it starts you can’t stop it and the helicopter will self-destruct from it just like ground resonance issues. So what you may be calling an oscillation is what I would call a “wiggle”. Because when it goes into a real oscillation due to P too high, believe me, you will know it.
I’ll have to look over these latest logs and params and see what we going here.
Hi Fred,
You were one that I was referring to earlier that flies a camera platform with a three blade rotor ![]()
Chris,
I realize that I don’t have the experience you have in flying auto flights. I know you spent some time working with DFC head and found that a tuning configuration that worked. Actually I would like to see that log file just to learn from it and why it worked. I find it hard to believe that if the system did not hold attitude close to the target in loiter then in forward flight I would think it would not fair that well with pitch excursions like I’m seeing in loiter. That is the whole reason I started working on the notch filter for the X3. Granted I have not had it up to the speeds that you have flown your helicopters but for the speeds I have flown, it holds pitch attitude within a couple of degrees. My only thoughts on your settings and why they work is that in forward flight the leaky I turns off and now you have the I term locking down the pitch attitude. That is only thing I can think of that would help maintain a solid pitch attitude in forward flight. Plus it would soften the response. Just trying to help.
In my humble opinion, I don’t think you have the data to conclusively say this about the FILT at 4 hz. I agree that this could affect the flight controllers response but I’m not convinced.
Again just offering my thoughts on what should work and what purpose elements of the controller should serve. I don’t think with the levels of P gain that Tim has tuned thus far, that it is far from the settings you used except for the FILT parameter. Up and away the leaky I will turn off and it will be pretty close to the settings you had on the 500 except for the FILT parameter.
I do Fred. Thanks for chiming in. I’m glad you are enjoying the thread. It does seem like there are a lot users like Tim and I’m glad you find this very informative.
Fred,
Im glad you find the thread interesting! I know my original goals for the thread were to learn as much as I can from people far more knowledgeable than I and to diagram the progression right from the start as I work through this project in hopes that it can also help other people with traditional heli.
I know my goal of learning is being met on a daily basis here, i feel quite lucky people like Bill, Chris Rob and others have chimed in and offered up so much help!
As to getting good video with my heli, I have found “Mass” has been the biggest boon for stable video. I run a rather large gimbal with full frame cameras and RAW video recorders like Atamos Ninja2’s and Shogun’s. I found the mass of the heavy gear has natural dampening inherint in it and combined with the isolation from the drive belts, fluid dampeners and finally the large jello plate mounted to the bottom of the heli yeilds smooth stable video. I tried some smaller gimbals and got less than impressive results.
Tim
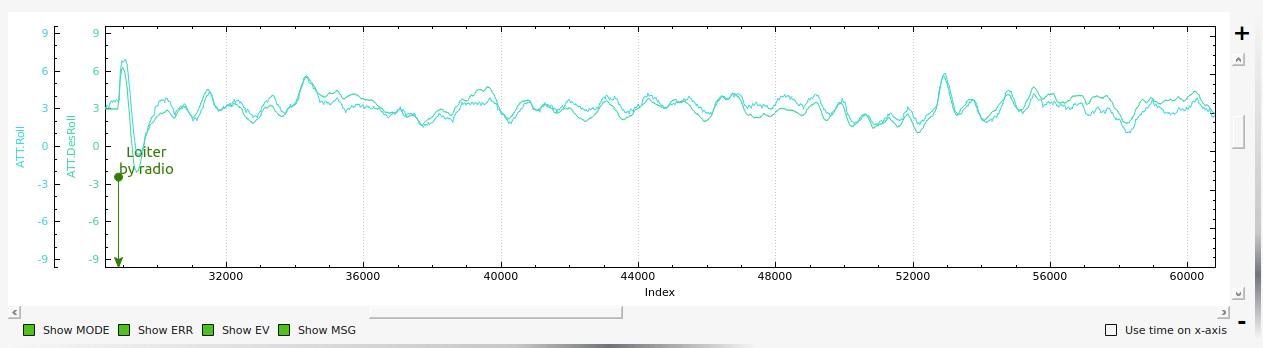
Well, I just grabbed a snapshot of one of the logs from my 700 flying Auto at about 45 mph. This is the roll plot between some waypoints. Notice how smooth it is, and you can see the tiny wiggles of the actual where the flybar is doing its job. They are 1 degree off between desired and actual because of my AHRS trim. But I don’t worry about that.
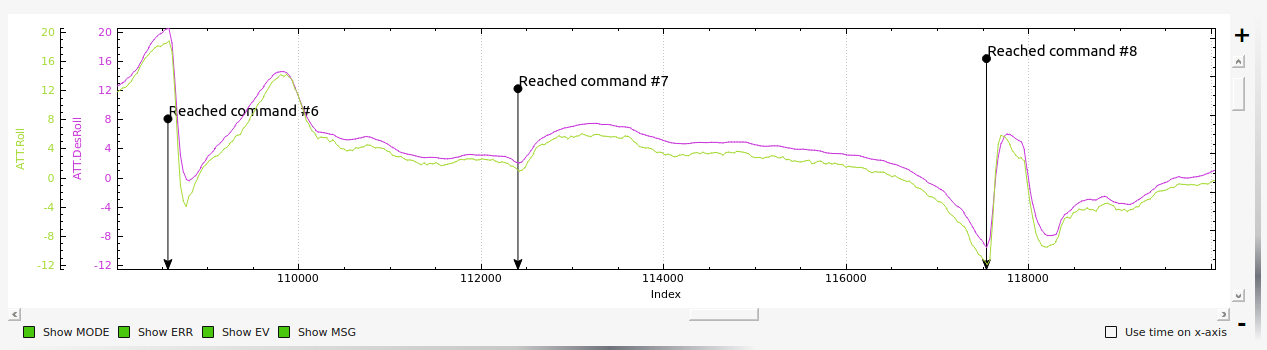
Ok, this is Tim’s plot of roll with his helicopter in Loiter. Notice how rough it is, and I’ve seen this to be a characteristic of FBL helicopters compared to flybar. They are just not as steady and stable, and try as I might I have never gotten my FBL to be as smooth as a flybar.
The constant corrections being made to the swashplate on a FBL helicopter to stabilize it, and the resultant movements, I think, are what Tim is seeing as “oscillations”. This does not happen on a flybar helicopter. If the autopilot wants 5 degrees roll right, it simply moves the swashplate to that attitude and the flybar does the rest. On a FBL, it works the snot out of the servos doing both attitude and stabilization at the same time.
I don’t believe you will ever get an electronic unit to match a flybar. But the trick is to tune it so it sort of flies like one, because that’s all most people want from their helicopter. And while I never been able yet to achieve that, I got it close with my FBL heli.
Graph Tim’s log and look at the number of times per second the autopilot is making those corrections in Loiter compared to the almost infinite and very fast tiny little corrections my flybar is making per second, so that are so accurate a solid mounted camera can get video at the target flight speed with no rolling shutter effect.
I don’t see where Tim’s difference between desired and actual is really all that bad. It’s just not smooth because the autopilot is not making its corrections even close to the speed and accuracy of my flybar.
Chris, Bill,
I should note that when i say it ossicilates or has a negative tendency, these are all very minor at this point and have been for awhile. It actually flies quite nice and any of trhe parameter changes ive instituded havent had a “major” impact on behavior. To me it feels like getting the last few percent out of an FBL, like head wobble on a hard stop or it drifts a few inches piroetting in place inverted etc. Nothing thats keeping it from flying, or makes me worried about a random gust of wind etc.
I had it up quite fast, i dunno if it is possible to pull gps speed from the logs? Id estimate 60+mph in a quick windy run this morning and it seemed fine? Coordinated turns feel smooth and flowing, although much more delayed or soft feeling than what im used to, but still feels good nonetheless.
The only “major” issue, and i use the term lightly as it weighted against the other very minor issues, was the weird fast ossicilation in what looked like the “Z axis” when I flipped into loiter quickly while descending somewhat rapidly.
Is it not a good idea to do that in the first place? Is that something i still need to tune out? All I do know for certain is that the 6 or 8 packs i flew this evening almost exclusively in loiter felt good, no issues and took the wind gusts well.
Tim
Chris,
I got it. The flybar does a wonderful job as a mechanical system. I won’t argue. I would like for you to post your log from the 500 with DFC head and the settings you landed on after tuning it. I would like to understand what is working well with that setup.
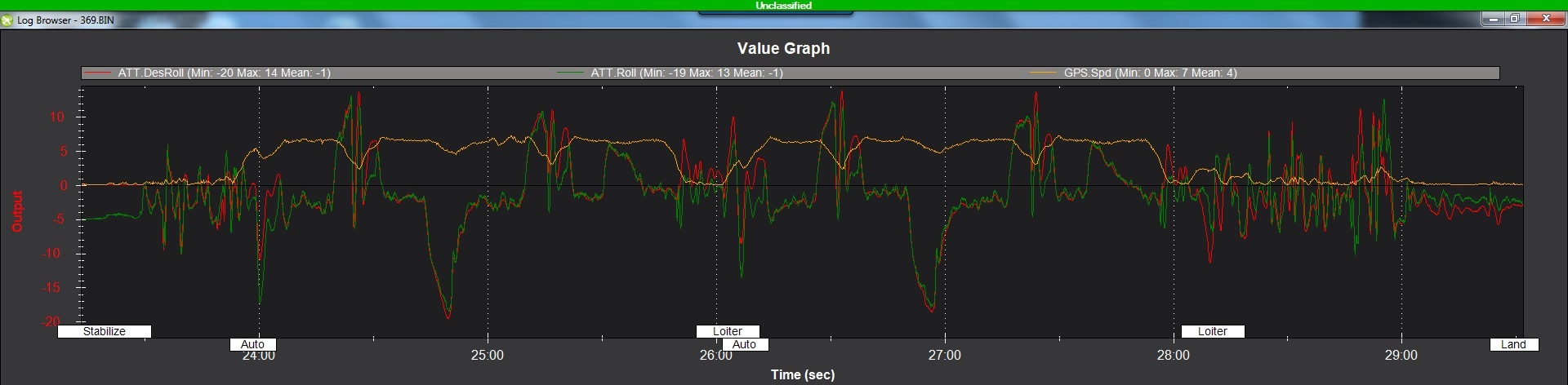
Bill, the BIN file won’t upload because of the size. I selected one that has several auto test flights on it. The link to that is here:
https://drive.google.com/open?id=0B5oLpNzxih4tdmxfNHg3Zks5RzA
The param file is the current one I just exported tonight after another test flight. I’ve been tuning the DDFP tail on it, and the compass was 20 degrees off due the tail rotor ESC mag field. So the only difference between these params and what was flown in the BIN file is some tweaks to the yaw rates and compass offsets.
Trex500DFC-PX4-AC3.4.6_May 24 2017.param (15.5 KB)
Chris,
Your comment makes me think of a few things. Firstly, i agree a flybar makes more dynamic corrections constantly vs say the Pixhawk im using now. That makes me wonder, it is just plain old processing power we need? Better sensors with higher resolution? Faster loops with more calculations for a given time? Or are the servos the big achilles heel? Or does this just come down to programming acuity and firmware design and implementation?
Im seeing large changes in the quality of data through small changes in the software. That tells me i have some work to do yet with tuning, but as far as how it flies at this point, its quite smooth and i am genuinely impressed at its stability in guating winds.
Tim
Rapidly descending a helicopter in its own downwash - no - it’s not a good idea to do that. Look up Vortex Ring State.
I’ll just kind of watch this newest tuning thing because I don’t really understand what the deal is with having to have that filter at 4Hz. It’ll be fun to see if you can get the autopilot to work with it set to that, because I couldn’t. I do use 4Hz on the yaw, though, which is one of the things I set to slow that down and make it more gentle.
I believe it’s all of the above, one more than the other.
But it’s a fair trade between mechanical-complexity, added weight/drag, crash damage and stabilization.
For 3D, crash damage and agility out weight stability so flybarless becomes more popular.
Flybar also locks you with 2-blades rotor
Chris,
Thanks for sharing your log and param file. I looked at it and first I noticed that the PID message is not in the data. If you could set your LOG_BITMASK=393214 in future flights, that would help see your PID term contributions.
From what I can see, it appears that as I expected the I term contribution is working to keep actual attitudes following the target when in forward flight. Once you come into hover the actual attitude does not follow the target as well and I believe this is due to the I term being leaked off which the leaky I feature turns on when AC is less than 1 m/s. I think using a high amount of I gain and low P gain is OK for stabilize mode because you are commanding attitude, but I don’t think it would be acceptable for acro mode. And yes I know that you believe that the acro mode is not necessary for an aircraft that conducts autonomous missions. So if you never intend to use a rate command mode like acro then your tuning seems to work well. I think we do need to talk to Rob about slowing the leak rate as it does not allow enough integrator to build and help the rate controller maintain attitude, even with ILMI non zero.
So to further my understanding and support my belief, I’d ask that you conduct another flight with LOG_BITMASK = 393214 and do some forward flight. I’d like to see the contributions of the P, I, and D terms.
Thanks for the data. It was very helpful.
Chris,
Well, I guess there is only one way to find out and I certainly hope it is more fun than it is well…the opposite of fun. Lol. I guess im the grand scheme of things it is enjoyable for myself anywyas as this project is increasing my knowladge of flight controllers and their inner workings/behaviors greatly and you personally have given me fresh look at flybars and their benifets outdide of 3D flight.
When you are only exposed to the FBL side of things as a 3d pilot, myself and many others tend to look at flybars as yesterdays tech and outdated, but clearly there is a reason to consider them still. The only issue someone like me would have with a flybar is kit and parts availability, especially when considering multiple platforms. In the case of Yamaha for example, im sure you are correct in that they use a flybar head for a reason, and I would love to hear the engineers ideas on that! But also with Yamaha, they have something a person like myself doesent, access to manufacturing and seemingly unlimited parts support so their platform choice is limited to their imaginations.
In my case I need to buy retail hobby grade kits and be able to get spares for maintenence and then without expensive modification, adapt them for my use which in this case is Aerial Videograpy and soon mapping. Which leaves me with something like Align’s Trex which is like the refrigerator of the heli world, they are everywhere and just about every hobby shop in the US has parts and even further Align carrys parts for all the FBL models and new kits to replace them cheaply.
As ive stated, im grabbing that nitro flybar as a second project coming up, but for the side business doing aerial work, i have to use a frame I can get parts for in the likely event of a mishap, and quickly. In a perfect would i could design and build my own platform and have the carbon, steel, aluminum and plastic cut, shaped and molded to my specifications at which point I would likely go with a flybar head citing many of the benifets you have demonstrated.
At this point though, i have to work with the hand ive been dealt, and its with an FBL helicopter and all its quirks. Ive talked with a few other people in the Aerial Videography world that are using helicopters for heavy lift, and they are in fact FBL helicopters. I believe they are mostly using the DJI Ace One Industrial controller? Ive watched video from a platform carrying a Red Epic camera and support equipment, so easily $60,000+ worth of camera gear and it was an FBL machine, so that told me that a stable, reliable platform with FBL is definatly possible, so here I am. I enjoy learning, which this project has been a boon for, I just feel I have alot more to learn to get the reliability and smoothness I need from the system using Pixhawk. Ill keep tweaking settings, and am still very interested in the notch filter from bill. From my un-professional opinion, I think there is indeed an issue around 5hz with my helicopter, regardless of headspeed. I do not know if its servos, the controller or some mechanical dynamic causing the loop but it pops up quickly when raising P gain and progressively gets worse till it ossicilates on its own sitting in a hover.  Im also wondering why the I term is so miniscule compared to P and even D when looking at the data?
Im also wondering why the I term is so miniscule compared to P and even D when looking at the data?
Tim