You can pull the log off the SD card for the run and graph the X, Y and Z vibes. Anything over about 10 on X and Y will cause issues. Anything over 25-30 on Z will cause issues. But the frequency of the vibration makes a difference too. Like my nitro engine heli hits 50 and averages 20-25 on Z, and is usually 15-20 on X and Y and has no problems. My 600 electric had way less than that - less than 10 and yet it kept having EKF problems.
So the other thing to look at is the IMU and IMU1 AccX, AccY and AccZ values and compare them between the IMU’s. They should be the same on all three axis. I was getting aliasing of the IMU’s because of high frequency vibration that didn’t show up on the vibe graphs in the electric.
Tim,
Here are my suggestions on your parameters list. when tuning the PID, my technique is to zero the pitch and roll I and D gains. Start with getting the P gain right. Definitely start in STABILIZE for tuning and using the wood dowel to give a wider stance is a good plan. Using the channel 6 to tune the P gains for pitch and roll. Are you familiar with this feature?
ATC_RAT_PIT_D,0.001 - Set to zero. Even this small amount can cause uncommanded oscillations
ATC_RAT_PIT_I,0.6 My suggestion in tuning is to put this to zero initially
ATC_RAT_PIT_ILMI,0 good
ATC_RAT_PIT_IMAX,0.4 good
ATC_RAT_PIT_P,0.08 too high for first flight. try 0.04.
ATC_RAT_PIT_VFF,0.06 seems appropriate. make sure your getting sufficient cyclic
ATC_RAT_RLL_D,0.001 Set to zero. Even this small amount can cause uncommanded oscillations
ATC_RAT_RLL_I,0.6 My suggestion in tuning is to put this to zero initially
ATC_RAT_RLL_ILMI,0 good
ATC_RAT_RLL_IMAX,0.4 good
ATC_RAT_RLL_P,0.06 too high for first flight. try 0.04
ATC_RAT_RLL_VFF,0.06 seems appropriate. make sure your getting sufficient cyclic
ATC_RAT_YAW_D,0.007 This seems pretty aggressive for first flight. cut back to 0.003
ATC_RAT_YAW_FILT,4 So you have pitch and roll set to 20. why did you choose to 4 for yaw?
ATC_RAT_YAW_I,0.17 seems appropriate
ATC_RAT_YAW_ILMI,0 good
ATC_RAT_YAW_IMAX,0.25 seems appropriate
ATC_RAT_YAW_P,0.35 seems high, might want to start around 0.2
ATC_RAT_YAW_VFF,0.024 probably alright since you are starting with P gain of 0.2 or higher
Tim, I would suggest setting this down to about .3 for your 800 or you will get rapid oscillation of the collective in Alt Hold or Loiter:
ACCEL_Z_P,0.5
These parameters, assuming you have zero collective at mid and 10-11 degrees at max indicate your helicopter is going to likely be quite touchy
H_COL_MAX,1700
H_COL_MID,1565
H_COL_MIN,1438
That kind of servo resolution is probably good for 3D or sport where you’re running 14-17 degrees of pitch. But in my opinion is a little hot for a UAV helicopter.
Chris,
I followed Rob"s setup video and set collective to 10is positive and the same negative collective with zero pitch in the middle. 8 degrees i think on cyclic, id have to put a pitch gauge on it again, but its whatever Rob recommends in his video.
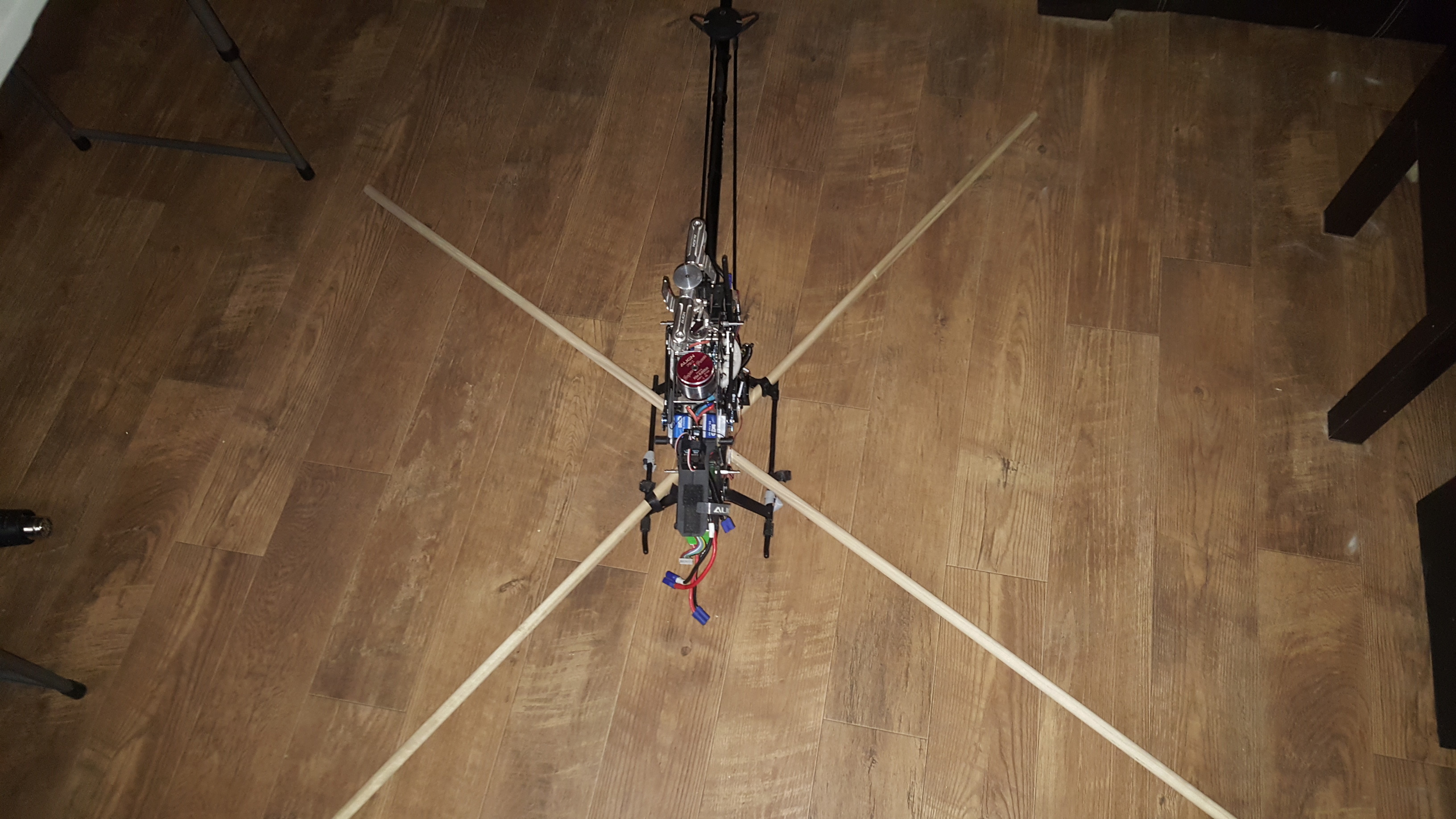
I appreciate all the help! Should be looking for a maiden soon, after i rig up some dowels for a cross base training gear contraption should it want to violently roll or something to that effect the first trip out.
Bill, the yaw values are what I run with my 700 except for I don’t use any VFF. I run 4Hz on the low pass filter on all my heli’s for yaw to slow down the rate PID loop a little. In 3.3.3 that used to be the default. And that’s where Tim got that from, I’m pretty sure. When I posted those I think I had suggested to turn down the yaw D a bit because not all servos are the same, and that may be a bit agressive. Using more D gain usually “softens” the P gain a little in the PID loop, as it helps prevent over-shoot of the target like a shock absorber.
Those settings on my 700 are with the linkage ball in the 10mm throw postion. If Tim’s heli is using the 13mm throw then reducing the P gain to about .25 and D to about .003 would be a good idea.
Tim,
So use the tuning feature of the software. Set channel 6 on your radio to a knob. Then use the TUNE parameter to set the parameter you want to tune. For pitch and roll P gain set the TUNE parameter to 4. You can check the parameter listing in the Copter wiki to see the other values for the tune parameter to set other gains. There are values for the TUNE parameter that allows you to set the Roll P gain by itself and the pitch P gain by itself. But initially just bring them up together. Then you have to set the TUNE_LOW and TUNE_HIGH parameters to set the value for the knob limits on your transmitter. So a gain value of 0.3 would be 300 for the tune parameter. So to tune the P gain I would set TUNE_LOW to 0 and TUNE_HIGH to 300. Then turn the channel 6 knob until you see 0.04 for the roll and pitch P gains. You’ll have to refresh the parameters to check the current value. Then you just have to turn up the knob during the flight to increase the P gain.
Bill, there’s so many variables for the yaw that its hard to come up with something that will work in every case. Tim said his heli is set up for LHS and that makes a difference on yaw authority, as well as what type blades are used. I just figure for a big heli that’s an unknown it’s better to have the tail twitch a bit than it is to have it too “loose” and go into wild swings as soon as the skids leave the ground. Been there and done that with the wild swing thing and it gets really hairy switching from nose left to nose right control orientation once per second
Bill,
Thanks for the real time tuning explanation. This is exactly how i am going to go about this. So i haven’t looked too deep into it yet, but is channel 6 the only one that can be used for tuning with one parameter at a time?
Reason i ask is i have 3 knobs and 4 sliders along with quite a few free channels.
Is it possible to say take 6 channels and assign them to tune P gain for AER and I gain for AER as well? Or is that just a very bad idea if it is even possible?
Just a thought.
Chris,
You are correct, that is where my numbers came from. I too would prefer a small rapid ossicilation vs having it blow out and spin wildly on the first flight all while im trying to keep it from wandering or crashing while tuning the P gains.
So ive been “keeping my head in the books” quite a bit lately, mostly studying the full parameter list, and i came across a couple interesting parameters.
-GPS_POS2_Y: Antenna Y position offset . The same parameter for X and Z axis as well. I was thinking that since the GPS is a large distance from the center of gravity and the Pixhawk itself, is this parameter of any use? Or am i not understanding its purpose?
-INS_GYRO_FILTER: Gyro filter cutoff frequency. Also is this parameter of any use when tuning?
-INS_ACCEL_FILTER: Accel filter cutoff frequency. As well as this parameter?
Or should the filter frequencies be left at defaults peroid?
Thanks,
Tim
Tim, that GPS antenna offset is a new thing in 3.5 I haven’t played with yet.
The other two I have never messed with, and don’t know what they do for sure.
I might sound stupid. But what I do when I get a new Pixhawk installation in a helicopter is to slide a 8 foot 2 x 6 thru the landing gear and put some cement blocks on the board so the heli has a hard time lifting it. Then spin it up and operate the helicopter at full collective and cyclic while it’s straining against the board to see how it acts.If it has a tendancy to tip, shake, spin, whatever, you’ll see it before you actually try to hover it the first time and the board won’t let it do something stupid. Also get a chance to see what you got for vibes et al operating with blades at full power where it can’t do anything bad if it has a problem.
Just make sure you use plenty of weight on the board and the weight can’t fall off if you do that, because a 700 can pretty easily lift 30 lbs and fly away with it.
This was added because of very high precision of RTK system. With GPS far from center of aircraft and centimeters level of precision, the copter will yaw about the GPS rather than main shaft.
This parameter compensate the distance from “yaw axis”.
With normal non-RTK GPS, you might not see the difference but it shouldn’t hurt to set it.
Yes. Channel 6 is the only channel that can be used to vary gains real time. You will want to look at the wiki on tuning. There are some gains that can be tuned together like the pitch and roll P gain. You can see all of the values for the TUNE parameter in the full parameter listing on the copter wiki.
Pitt,
Thanks for the explanation. That makes sence. I have a question, so when I am in MP sitting on the bench I see the GPS go through 3 different status’s. 2D_GPS fix, 3D_GPS fix and finally d_GPS fix. The status of the Here led color changes and goes from slow flashing green to rapid flashing green with a dGPS lock.
Is this unit actually accessing the dGPS system with its signaled correction?
Thanks,
Tim
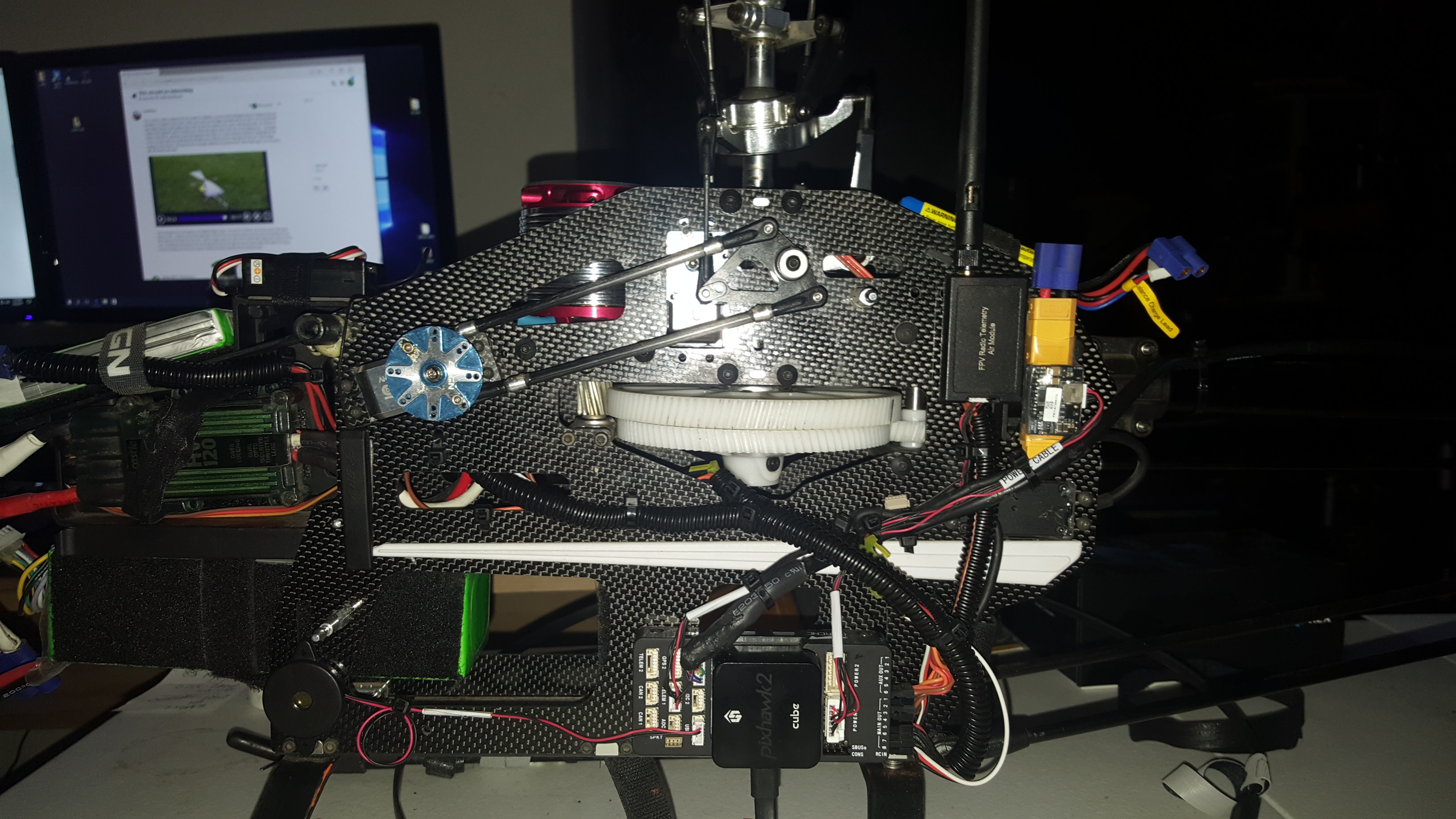
So broke out the calipers and measured my servo center to ball distances. They are as follows,
Tail: 13mm using a Spektrum 6210HV .03s at 8.4V
Cyclics: 10mm using BK7001HV .049s @ 8.4V
I remember a comment from Chris about servo horn distance and how it affected gains and I have adjusted the tail to ATC_RAT_YAW_P .25 and ATC_RAT_YAW _D .003. ATC_RAT_YAW_I .17 After building up a quick training gear of sorts…first time ive ever used training gear btw… I am somewhat confident getting the cyclic tuned at this point, I just want to make sure the tail is not going to turn the heli into a tornado of parts on the pavement the first go out.
Chris, I like your idea of using the 2x6 with some cement blocks and will most likely do just that, but once I know the heli isn’t going to tip over and I get rid of that and swap over to the 6’ 3/4" dowel training gear, the tail will come into play and I just want to have the best chance possible of success. 800mm wide chord blades are not cheap unfortunately, and its getting harder to get sets of the Align 800’s now that they have swapped over to the 780mm narrower 3D blades on everything. uggh.
I hate having to ask and re-confirm so many seemingly simple things, but not having any experience with this system at all has got me being extra cautious. I’d put it on a smaller heli to start with, but alas I do not own any heli smaller that a 700 anymore.
There is no replacement for experience, and with this, I have none.
Thanks,
Tim
Tim,
I think your dowel is sufficient to widen your stance and keep your aircraft from flipping over. Here is a video of one of my initial flights where I was tickling an instability in roll. The whiffle balls make it pretty easy to see the oscillations. I think the roll P gain was 0.07 when I saw this. https://drive.google.com/open?id=0B1F0ST10P14JdmstTFFVckhmWkU
By the way, this was originally a 30 size nitro heli. Making it into an X-3 configuration with an electric power system, the weight went from 7 lbs to 13 lbs. That is why I went to a 4 bladed rotor using 550mm blades.

 Tim
Tim