Dang nice work guys
had no idea solo would still work with Solex and 3.5
exciting
One more thing to be aware of. I did a factory reset today which bricked Solo.
Reset progressed on Artoo, but never completed in the Pix. Subsequently it couldn’t be paired with the controller anymore.
Only solution was to hardwire the Pix to Mission Planner via USB, and then upload the original 1.3.1 fw and parameter file.
Then the reset eventually completed, and I could pair and reinstall everything again.
I suspect the same underlying problem as seen in the RTH issue. There appear to be some issues in the Artoo-Pixhawk communication.
And to me it appears that this is also related to the MNT_DEFLT_MODE setting in combination with an incompatible change in 3.5 over the 3DR fw which hampers the Artoo talking to the Pix.
The same happened to me when I tried a factory reset. It’s compounded by the LEDs and beepers not working the same way they do on the Solo branch, so you can’t actually tell what it’s doing, or trying to do.
The home position crashing the Solo’s Smart RTH/RTM procedure has a fix going into Master! It was indeed as I suspected… requesting the home location by asking for Waypoint zero. And if there was not and never had been a mission loaded, Arducopter’s response to that request was that there is no mission so you’re asking for something that doesn’t exist. @peterbarker created a commit that will let Arducopter always respond to the mission waypoint zero request, even if there is not and never has been a mission loaded. WP0 will always report the home position, whether there is a mission loaded or not.
So the fix is in and I believe will come out with Randy’s next release, which I believe will be 3.5-rc4. This solves a major operational reliability an safety issue for operating master on the Solo!
3.2 has EKF 1. I use it on one of my aircraft
I tried to bring the 3DR code for the ESC slewing into master. I thought I had it. The code compiled and it flew nicely. But it’s hard to tell in flight if it worked or not. I’m have a hard time determining what is going on here. It seems odd to me that I can push this thing really hard, literally trying to make it fail, and it remains rock solid. But when it tries to RTH, this happens. Twice.
I let the failsafe kick in. The Pixhawk switched to RTL mode. The companion computer immediately switched it to guided and kicked in the Smart RTH. It climbed up 30 feet. All normal. Then instead of flying home, it started getting all twitchy for several seconds. The compass EKF went yellow. Then after several seconds, the compass EKF cleared. Then it tumbled and flipped out of control. Until it landed in the end of the lake. Last time, it recovered from the tumble before crashing. This time, no such luck.
I only have a tlog. https://drive.google.com/open?id=0BwxNJyHTG9XJYXRqLVh2XzFudHc


Here’s a video. I can’t believe the file on the GoPro was intact. From the ground, I could see and hear the aircraft twitching like it was losing its mind in some way. The video confirms what I thought I saw. The aircraft was twitching and it seems the attitude information going to the gimbal was equally out of whack. This went on for about 6 seconds. Then it tumbled. I am really not sure what to make of this one.
Looked like it was possess.
What are you going to do now?
I have another best buy Solo. My green cube arrives today as well. So I will be back in the air for major testing on Friday and Saturday. Lots of good Solo stuff has or will be going into ArduCopter master over this week and last to test while I’m at it.
2 Likes
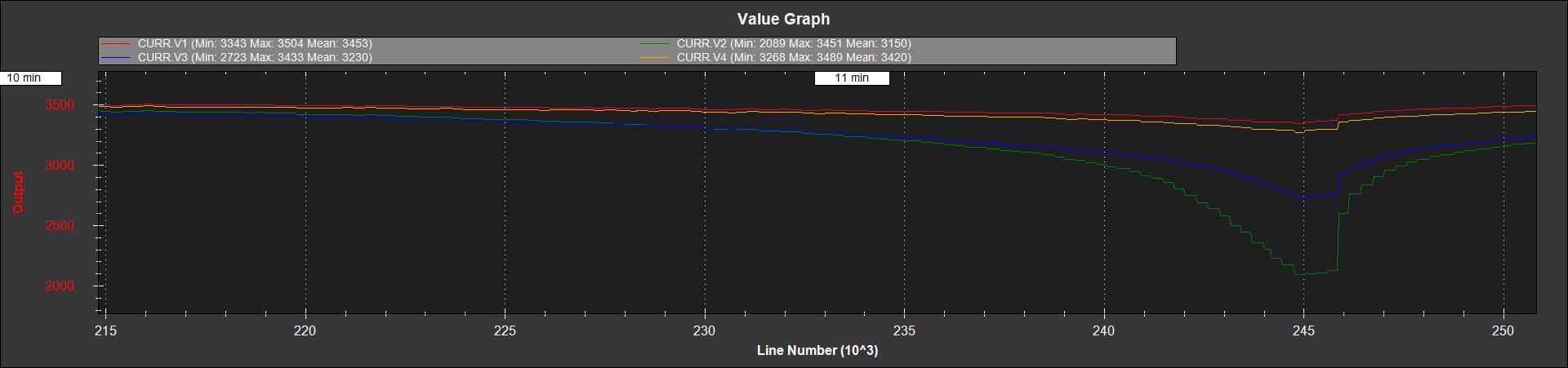
Some videos from today’s testing. Burned through 6 batteries and each one went great… finally! I had to rework the manner in which 3DR configured the failsafes and return home functions due to serious safety and reliability issues. I also put everything up to full rabbit on the app speed sliders. Basically tried to make it fail. And it never failed! Stable flight, no flipping out, no EKF kanipshits, reliable RTL/RTM, failsafes are actually safe now. All my testing up to now was very frustrating due to these software and hardware problems. The @proficnc Green Cube fixed the hardware issues. And I think I fixed most of the software issues effecting flight safety and reliability. Between myself and @mtbsteve, parameters are in pretty good shape. So testing today was great! I was happy and smiling the whole time rather than cringing and hoping I don’t die.
Disabled the “Return to Home Smart Shot”, replacing any instance of it with ArduCopter RTL. This fixed a LOT of safety and reliability issues. This situation is what let to most of my crashes and near crashes. All the crazy twitching, EKF overloads, ESC failures, etc were from that. It is now smooth as butter working as you’d expect from ArduCopter RTL.
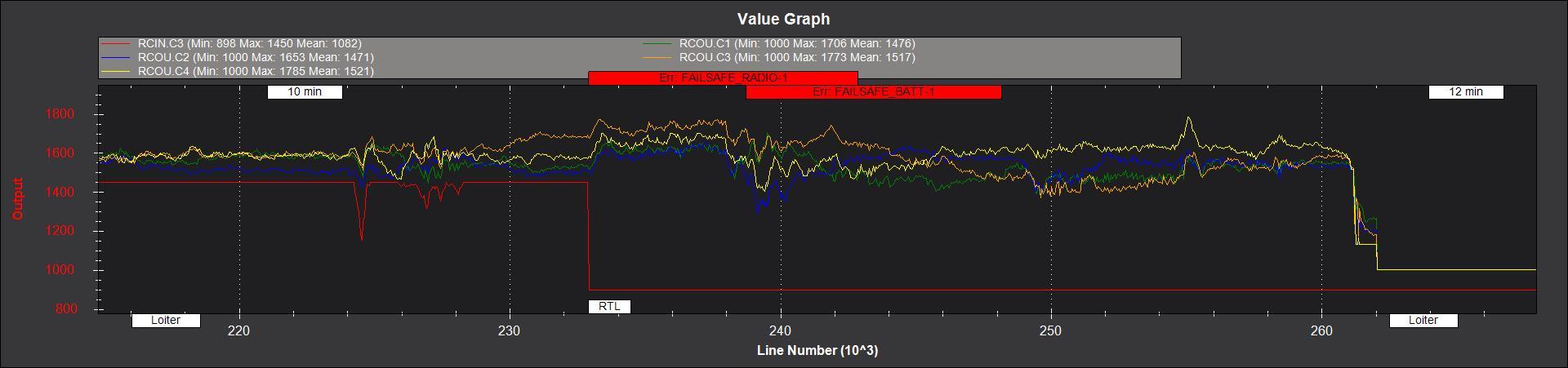
SMBUS cell voltage monitoring courtesy of @WickedShell. I sacrificed this battery to science, letting it run down into the ground to see what happened. The two cells that tanked were low through the whole flight, and clearly died first.
Awesome job! Glad to see this all coming together! A lot of great work by so many people!
Joined the club tonight
what do we need to test specifically?
going to be off next week so I plan to burn through a lot of batteries or fly till it crashes
1 Like
And what happend to this discussion, great work, but are we done? Was there not still some issues to workout?
It has made great progress. See here for a recent update:
http://discuss.ardupilot.org/t/update-on-mastering-solo-major-milestone-reached/17959
Just waiting on the changes to become part of master
it flies great, smart shots work, and even solved the long disarm times.
Getting a second cube and here for my primary solo soon
at that point both my solos will be on master and moving forward
1 Like