Hi,
I am running mainly mapping missions with a quad Easy Drone XLPro 3.3.3 Arducopter on a Pixhawk.
Yesterday and today, it happened that the quad lost its equilibrium twice, yesterday just on top of me before landing, and today in the middle of a straight line. So today it is not due to a brutal transition in trajectory, like I thought yesterday.
My first impression today was a quick lost of power. The XLPro have a contact system between arms and avionics which not give me 100% confidence. I think it may becoming loose with time.

But I am unable by looking in the log to be sure of my impression. This is what happened :
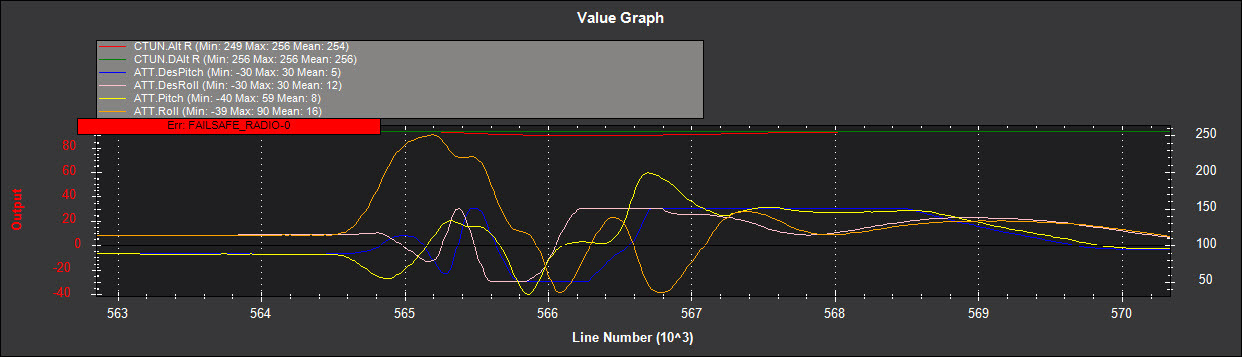
Attitude
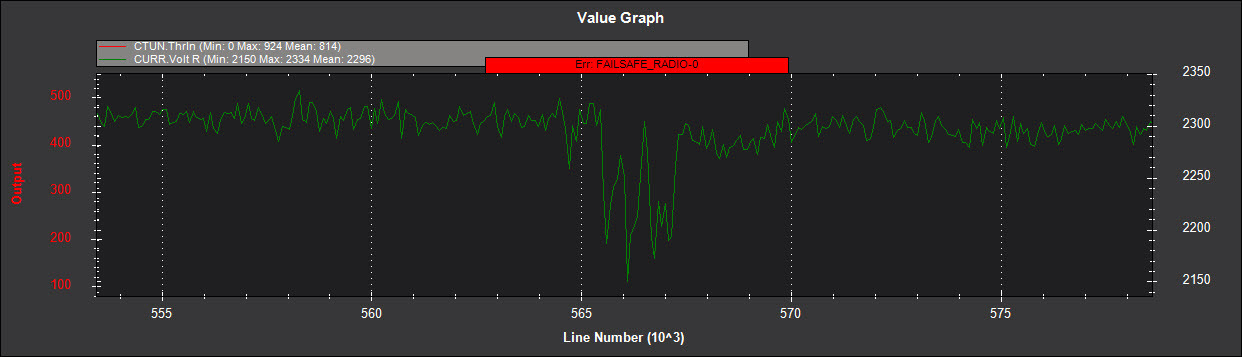
Power (indicative, the measurement is at the lipo level, and can not reflect if a motor loose power, here we see probable peak when motor accelerate to recover level)
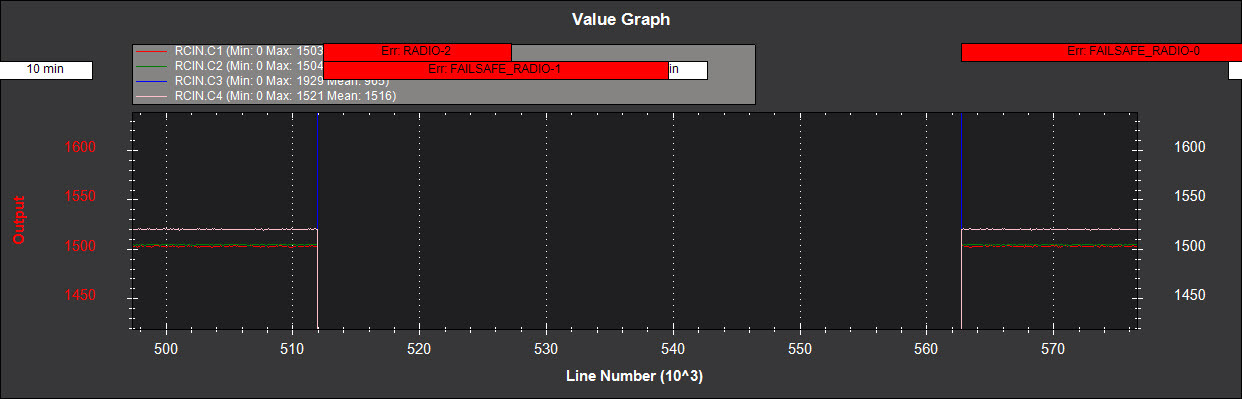
There is a lost of radio just before, but I am on “continue if auto mode”, and the lost occured much before
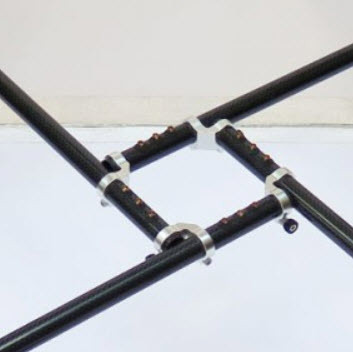
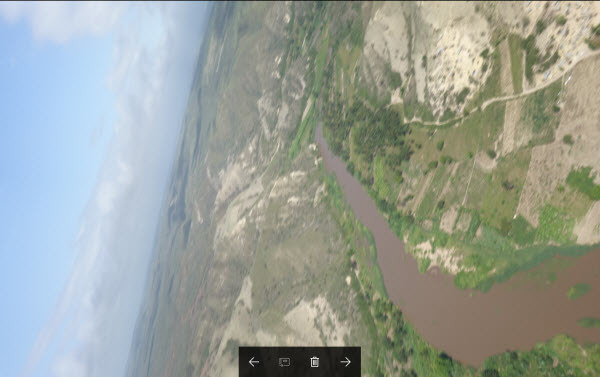
This is the location where it occurs, and a nadir picture (supposed to be nadir !)

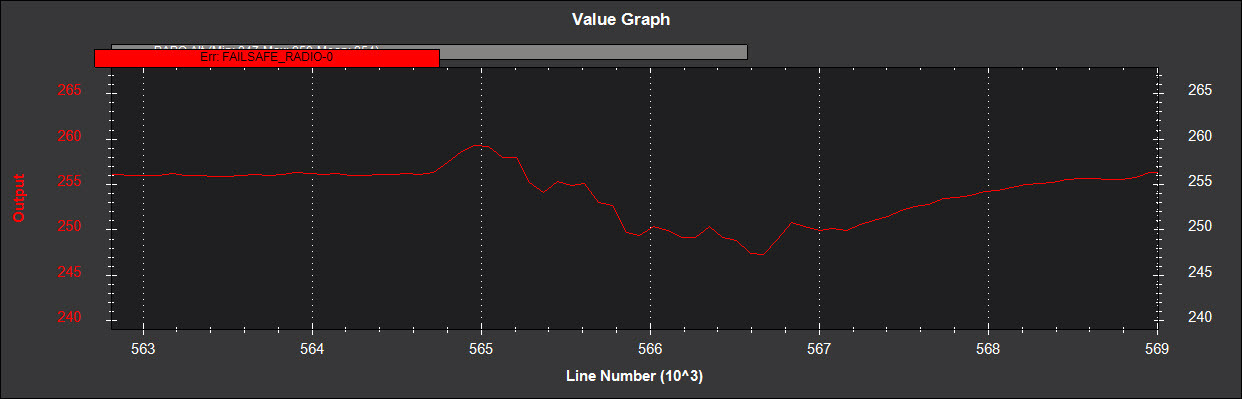
Lost of altitude from baro (256m to 247m)
Do you have suggestions where I can look ?
Thanks