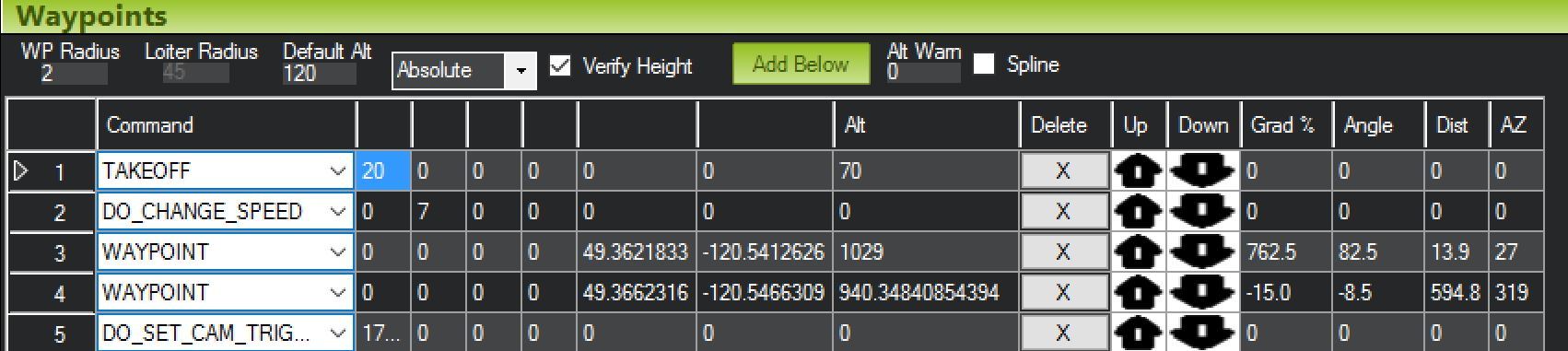
I’m planning some missions in absolute mode because I have no idea where my LZ will be. First a question about Takeoff and it’s fields. All my waypoints are the actual altitude, so presume the value of 70m in this example means 70m from where ever my home point is. But what’s the field on the left for with 20? 20 what lol? Can’t imagine this being a delay. The other question about mission planning in absolute altitude. What’s happens when your last waypoint is 100m below you and the next command is RTL? Will it ascend before heading home? Thanks!
Hey X1… I’m assuming you are operating a fixed wing drone. Is that correct?
For ARDUPLANE, in the TAKEOFF Command, the 20 refers to the “Pitch Angle” in degrees or how steeply it climbs out. A higher number will command a steeper climb. 15-20 should be acceptable if your plane is reasonably powered. The only other field you can modify in TAKEOFF is the ALT field and this would be the target altitude you want the plane to achieve before it moves on to the next waypoint. I would refer to the page describing automatic takeoff:
http://ardupilot.org/plane/docs/automatic-takeoff.html
With regards to Absolute Altitude, I was struggling through some frustrations with my fixed wing drone due to “Absolute Altitude”. I didn’t see a good explanation of it in the Mission Planner tutorials as it seems to be a recent addition or re-addition. It is EXTREMELY important to understand the distinction between Absolute and Relative settings.
“Absolute Altitude” refers to altitude above sea level (MSL) where as “Relative” refers to altitude above ground level (AGL) with 0 being established as the point where/when the autopilot initializes. In my location, the terrain elevation is about 1000 feet MSL. If I want my plane to fly 400 feet above the ground, I would use 400 feet with “RELATIVE” set. But, if ABSOLUTE is selected, I would enter 1400 feet as the desired altitude.
I nearly got into trouble when I tried to fly my plane with a mission accidentally planned in “ABSOLUTE” altitudes. My automatic takeoff wasn’t behaving properly and wouldn’t complete the climbout sequence to the target altitude. The reason was my target altitude of 400 feet ABSOLUTE meant it was trying to go DOWN to 400 feet MSL which in my area is 600 feet BELOW THE GROUND.
I can understand why some would need Absolute if they are launching from a higher elevation and need to dive down below the launch altitude. Apparently, the APM struggles with negative altitude settings.
With regards to RTL, the plane should climb or descend to the altitude you designate in the RTL waypoint.
Hope this helps.
Actually it’s a multirotor. I wonder if Absolute altitude isn’t supported with arducopter? That would explain why I’ve never seen the first field populated as this is the first time selecting absolute alt. Sure would be good to find out before work tomorrow lol! Thanks for your input!
depends on what version of arducopter you are running. only realy new stuff supports absolute alt’s
It’s the latest 3.3.3, not 3.4 beta. Can’t find any reference to either supporting it. Not sure what a multirotor is going to do with the 20 degree pitch angle.
the 20 degree pitch will be ignored.
So Michael, is absolute alt supported in 3.3.3? At work today I flay all day with new flight plans using relative. Didn’t want to risk it lol.
Automatic landing and ABSOLUTE altitude:
This is going to be a story. I use a wing that can get pretty heavy. It takes off automatically by a hand throw when it is light. When it gets heavy (more battery) I go to a 500 meters distanced river bank that rises high above the river and through it there. That way the wing has enough height to loose before it gains the speed and is able to climb. The river bank is 30 meters lower than the original take off point. Now.
The problem is: I do not now I am going to use the take off location at the river as I am lazy and try to throw the wing at the original take off position. If it fails, I go to the river and succeed there for sure. If I plan the mission using the RELATIVE alt, taking off from the river bank, is the plane going to be 30 meters lower when landing. I would cure this using the ABSOLUTE alt.
This is how I plan to do it. I would like the experienced users to look at it and say their opinion if it is right or not.
ABSOLUTE altitude is the altitude above the mean sea level measured at standard atmospheric pressure which is 1013.25 Hpa. My original take off and landing point is at 245 meters above mean sea level.
Before the mission is planned I look at the internet to find out what the QNH is.
QNH is a Q code used by pilots and air traffic controllers, indicating the atmospheric pressure adjusted to a sea level for a given location. It is used because the barometric pressure changes constantly with location due to the weather development (we do not want to get deep in to this).
Simply:
My landing point height is 245m MSL (above mean sea level when the air pressure is 1013.25 Hpa)
Due to the constant weather development I need to look at the QNH for my area to have the autopilot determine the landing height precisely. Lets say the QNH is 1017 Hpa.
I need to get the height difference figure for determining the landing point height for the present barometric pressure.
We will count it using:
QNH (atmospheric pressure adjusted to a sea level for a given location)
ISA (international standard atmosphere)**
hPa to meters of air (1 hPa is approximately 8.3 meters of air [15 °C])
Landing point height difference for the given pressure is (QNH - ISA) x 8.3 (1017-1013.25) x 8.3 = 31,125
Setting the landing point height for the mission is then 245+31.125 = 276.125m using the absolute altitude.
It works as well if the QNH is less than the ISA. Lets say it is 1006hPa
(1006 - 1013,25) x 8.3 = - 60,175
Setting the landing point height for the mission is then 245 - 60,175 = 184,8m using the absolute altitude.
Now is that right?
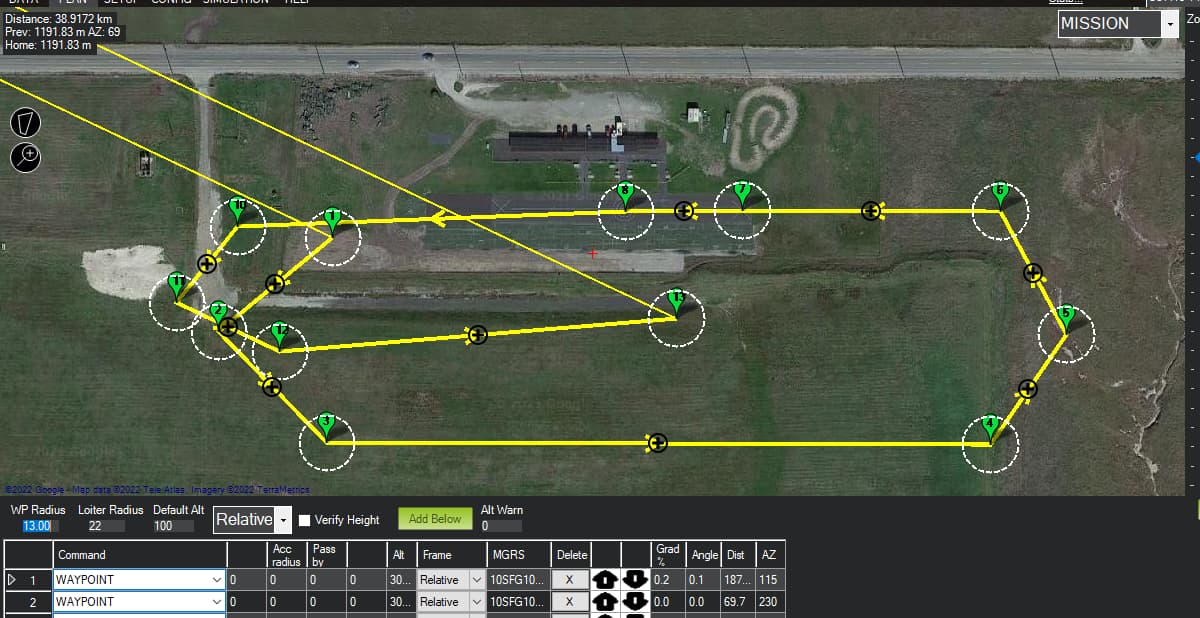
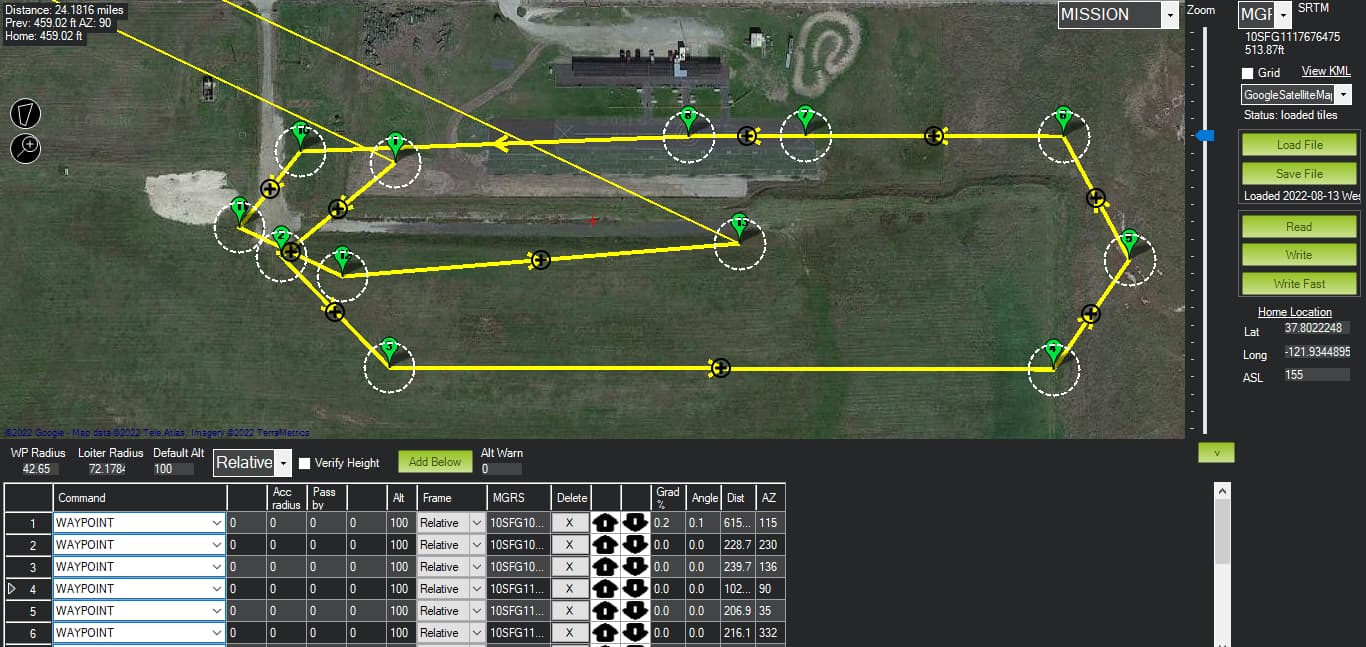
@AeroLogix, @Allister although your explanation makes sense. But recently I am noticing different behavior in MP and log data.
My mission was 100m relative alt, but the log file seems to suggest otherwise. The ASL at my location is ~155m above sea level so one would expect the log data to be ~255m. It is not, nor the flight seems to be visually at 100m AGL. Visual it looks like b/w 30 to 50m.
What am I missing?

What units are you using in MP? I ask because I see FT in a few places on your screen, but log is in meters. 100Ft is ~30m…
Good catch! I have been trying to figure this out as well, but I find no document or parameters to verify/change units in either MP or somewhere else.
At one time this aircraft was fitted with FPV and I recall setting the OSD in the imperial system. OSD and other stuff have been physically removed.