This is the amount of slop in the tail
Majority is in the tail slider. A little bit in the pushrod/servo.
This is the amount of slop in the tail
That amount won’t cause it to not track heading. It may make it “hunt” back and forth a bit sometimes, but I think I would try turning up the I gain a bit first, and leave the rest of the settings where they are. Adjust one thing at a time. Maybe make a short mission where the helicopter flies in a circle or something and returns back to home. Fly it at slow speed so if it doesn’t track yaw, it doesn’t have to fly sideways very fast. Fly the mission repeatedly, don’t make any rudder input with the radio, and turn up the I gain a bit at a time to see if makes it start tracking the heading. Start at 0.17 and if you get to around 0.25 and it’s not fixing it, then that’s not the problem.
If it’s not I-gain, then I’d look at increasing the RC4 deadzone to 30 or 40. I’ve seen where if the deadzone is too tight, some radios will put out a signal and cause the aircraft to hold one heading during an Auto mission. I didn’t see that in your log, and you say the tail doesn’t seem to be quite as locked in as it should be. So I suspect the gains first.
And finally, if you get it to track the heading, and it seems “sloppy” then do something about that tail linkage.
Hi
It’s been to windy to try AUTO on my 45Pro. While I’ve been waiting to get a good test day, I decided to check my head speed. I’ve never thought about it before, ISo I purchesed the Headspeed Tachometer, that you advised in another Topic. So my tests to-day were giving me a speed very close to 2900rpm. As I said it is on a 450Pro FBL heli.
Any remarks would be helpfull. The weather looks very good for Wednesday to do my AUTO flight.
Hi Geoff,
That’s right in the ballpark for a 450, maybe a couple hundred fast for a UAV heli. Smaller helicopters like low headspeed less than big ones do. So now that you have a tach, you could turn it down to 2,600 or 2,700 and try it. If it’s really sluggish and doesn’t fly decent, or takes too much collective to hover it, then turn it back up.
You’re really not going to save that much power slowing a 450 down. They run really low blade tip speed to begin with, compared to 500-700 class. And your helicopter looked really good in your video. So I would consider it experimental to turn it down some and see if it still flies good.
Hi
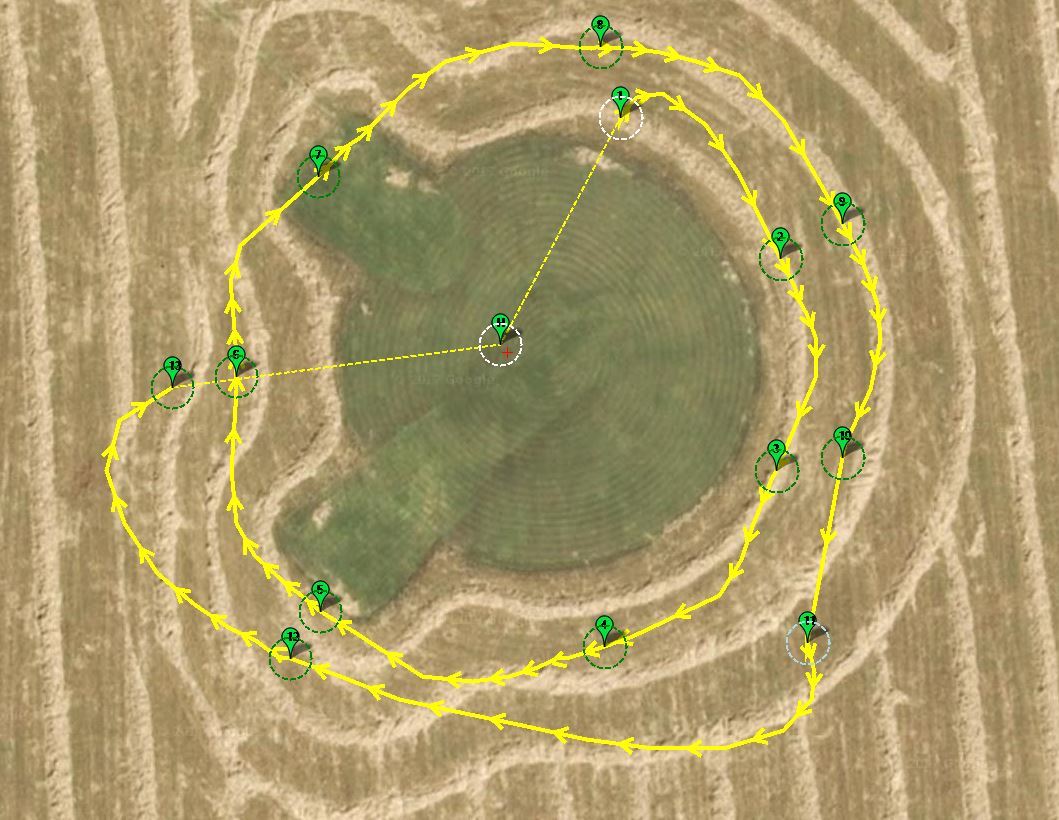
Well I go my AUTO flight in to-day, I think it went fairly good. It did just below two circuits of our flying field. Took off in STAB and switched to LOITER, all looked good so I hit the AUTO switch.set to 10Mtrs then a short run at 5 Mtrs. Later on it was told to LOITER for 15sec then carry on to come home to a RTL. It missed the board by about 1 Mtr.
I’ve attached the Bin file and a Video of the flight( some of the shakes was my camera operated, and the planned mission.
2017-05-24 10-19-58.bin (3.5 MB)
That looks really good. I’m not at my computer with APM Planner2 in it right now but I’ll look at your BIN later this evening.
Nice job on getting your 450 to fly that nice, though!
Geoff, I looked over your log and I don’t see anything wrong with it. Looks to me like you got a really nice flying 450 there.
Hi
Thanks Chris and Bill for taking the time to sort me out… As I said before I am the only club member to fly Helicopters,so I don’t have anybody to discuss the setting up with.
Geoff
No problem Geoff. I’m glad we could help you.
Hi Chris & Bill
I did a Auto flight yesterday. There seems to be a little shake, but I can’t make out if it’s YAW or ROLL. but the flight went very well. I’m open to suggestions.
The bin file3 was to big to download, but I can upload any screen shots you may require. Near the end of the flight It did a LOITER TURN at 2mtr radus.
attached Param’s File
Quad030617.param (14.1 KB)
Geoff, it was kind of hard to tell from the video, but it looked like a little bounce in the pitch? Is that what you would think?
What I have done, and it works pretty good, is if you have a lightweight action camera like a GoPro - mount it solid to the helicopter (no gimbal) and review the in-flight video taken with it. It’s very easy to see which axis it is that’s giving you jittery video.
If you determine it’s in the pitch axis for instance. You can try to soften that a bit by setting this to say 3.5 instead of 4.5.
ATC_ANG_PIT_P,4.5
And you can also play with these angular acceleration rates. For littler helicopters I’d typically quicken those up a bit (the increment is 1000), bigger ones I’d slow them down so the helicopter makes more gentle, smooth, graceful moves. Like a 600, I’ll have pitch and roll around 72000. For a 500 probably default 110000. For a 450 maybe 150000. This is the angular acceleration in centidegrees per second per second that is allowed. So, for instance, if you have a pitch bounce just because it accelerates too fast on the pitch axis and you get a “bounceback” effect from it, soften it a little by setting the pitch to, say, 90000.
ATC_ACCEL_P_MAX,110000
ATC_ACCEL_R_MAX,110000
ATC_ACCEL_Y_MAX,27000
So, finally got out with my heli again. I had a quick session a few weeks back where I added the suggested tweaks to the tail rotor.
On the first pack today, I went through a quick ‘retuning’ of P & I to see if I could improve on it, but I quickly ended back at my original values. Previous session I had also experimented a bit with the head speed and found that if I increased the headspeed, I needed to lower my P value.
I’m now back at the original head speed, but I also have asymmetrical blades on it, so I think I can probably go lower still.
Anyways; I still think stabilize could be, well more stable, but loiter was looking pretty good, so I decided to give a small auto-mission a go…and it was kinda awesome?. I might even have done a little dance when it auto-landed on it’s own. The only moment that looked a bit out of whack, was when it stopped to start the landing procedure, but it was more the abruptness of it than anything.
I put the camera on it and ran the mission two more times. I now really need to move to one of my larger, more remote spots so that I can expand on this without worrying about the surroundings.
If any of you would have time to look at the logs to see that it’s behaving as it should, it would be much appreciated. Also added the video, which, as boring as it is, represents a decent milestone for me.
Log:
Parameters:
Jakob, that is really cool. And your helicopter is nice and smooth too and takes nice video, with what I assume is a solid mounted camera!
Thanks! More or less. It’s got a single foampad between the camera & frame, but is still strapped to the frame with a velcro strap.
Need to get moving with the custom landing gear!
Hi
Attached video taken with a fixed camera , on a auto flight. It does various heights between 10mtr and 3 mtrs. The 3mtrs turned out a bit low, which we put down to temp variation with the blades runnings, and the heli standing in the sunshine.
Also a bit over exposed. Should be better next time