The code that we used for our coaxcopter was the one in the ArduCopter v.3.2 Firmware (latest version available back on 2015), which was a beta version in 2015. We didn’t make any code modifications, just selected corresponding firmware on the Config.h file.
I had download links but they don’t work any more, and I don’t currently have the files of the project
I have a problem about surface control of single copter when copter armed.
at first test when the vehicle is not arm roll and pitch surfaces control work fine but when copter armed roll and pitch surfaces doesn,t work properly and roll and pitch servos starts jitering motion or there is delay in roll and pitch command from radio control to surface control. I use pixhawk board for control of single copter according to http://ardupilot.org/copter/docs/singlecopter-and-coaxcopter.html.
If I recall correctly the jittering once armed is normal for the later versions of the code. The control surface deflection is calculated to be inversely proportional to the throttle level. In other words, if the throttle is low the surface deflection is greater. This is because at low throttle levels the surfaces have less airflow over them and require more deflection to produce the same forces (moment). The output to the surfaces is fluctuating slightly and that slight fluctuation is amplified by the near (or at) zero throttle level. To confirm this, try removing the propellor or disconnecting the ESC and increasing the throttle to see if the jittering on the controls reduces. Additionally, the surfaces may not respond normally when on the ground because your control outputs are being combined with the sensor data to try and hold a particular attitude. If possible try having someone hold the copter in the air and change the vehicle’s attitude manually. First leave the controls centered and move the vehicle around to make sure the vehicle is using the control surfaces to make corrections in the correct direction. Next have them follow your inputs to essentially trick the controller into thinking it is flying and make sure the control movements again match what you expect.
I am not sure how to fix the delay. It is something I do recall experiencing in bench testing, but I do not remember it effecting the test flights. If the problem is serious enough it may be worth messaging one of the experienced developers on here such as Leonard Hall or Mackay. If at all possible I recommend preforming some form of tethered test flight once you’re ready to see if the problem occurs in flight without risk to the vehicle.
Hi droner
I send Picture of My vehicle in this letter. Is there any problem in my
center of mass or external shape single copter? we test my copter and hold
the copter in the air and change the vehicle’s attitude manually.
in our test First leave the controls centered and move the vehicle around
to make sure the vehicle is using the control surfaces to make corrections
in the correct direction and them automatically roll and pitch by change of
my vehicle attiude but control surfaces don,t follow my command roll or
pitch even in high throttle.
where is my problem?
It looks like you have surounded your fins in the shrowd making it hard for the air to be deflected by the fins. You should probably lift the lower edge of your showd to let the air move forward and back, left and right, to control roll and pitch.
Your fins should not touch each other at maximum deflection of both fins.
It is hard to see what way things are moving and what angle you are holding the aircraft in your video but it looks like it is moving in the right direction but that your gains are too small.
The other thing that is probably confusing you is the I term is growing to maximum and dominating your output. If you set I_Max to a small number this will make the reactions clearer.
Thanks you from your Attention to my question. I have several questions from your opinion :
What do you mean by shrowd? Is there the same white chamber that the blades are located in? And
That you said shrowd should raise its lower edge so that the roll and pitch control are carried out, i.e the white chamber requires for bases or should the lower edge of the blades be taller?
Is there a need to change the size of the blades? In height or longitude direction?
What do you mean by gains? control PID gains or word mean resault? which one of control PID gains should be raise?
I will reduce I_Max parameter next a few days and will send it’s resault. What is the effect of the I_Max parameter on the operation of the copter intuitively and physically?
excuse me because of my Shortage ٍEnglish language
Thanks alot for your help
I have a strange problem setting up a coaxcopter. When armed, the motors don’t respond to throttle input(but they do receive an idle signal), the flaps are not stablizing, only responding to pitch/roll commands. I connected the two flap servos to output 1-2 and two motors to output 5-6; the ArduCopter version is 3.5.7; Pixhawk version 2.4.8; performed all calibrations.
I would really appreciate if anyone knows what the problem is:pray:
I have. In fact, the ESCs didn’t receive signal(they did the “waiting for signal” beep) until I armed it with the button. Is there any other arming procedure I wasn’t aware of?
So the arming button needs to be pressed.
Then you need to arm the aircraft with the right rudder command.
You should be in stabilise.
Increase the throttle very slowly to full throttle.
So if you do that in that order and nothing happens then have a look on your telemetry and make sure the channel outputs that the esc’s are plugged in are increasing.
Make sure your ESC’s have been calibrated.
If that doesn’t work then turn on logging when disarmed and repeat the process and show me a log.
A problem occurred after several months of normal flight:
After arming, the outputs on the servo channels(1-4) slowly increase/decrease to either 1100 or 1900. They are also extremely sensitive to yaw input and get stuck at 1100 or 1900. Radio inputs are all reading normal. I’ve tried re-installing the firmware and re-calibrating accelerometer and compass. What may be the problem?
I built the coaxial copter. Motors is working but servos not moving.
And while I moved roll and pitch stick, motor RPM is varying.
Hardware set up:
I am using pixhawk 1.
servo 1 and 2 are plugged in output 1 and 2.
motor 1 and 2 are plugged in output 5 and 6.
Parameter setup : using latest firmware.
servo output1: RC1
servo output2: RC2
servo output3: not use
servo output4: not use
servo output5: motor1
servo output6: motor 2
I spent the whole day to figure it this but failed.
I’ve built a coaxcopter too and it’s seems that i have the same issue as AeroGen.
So, i used the 3.6.5 firmware on PixRacer (ChibiOS for BLHeli32), wired as in the wiki (Servo1:Front Flap,Servo2: right Flap. Servo5:Upper Mot Servo6:lower Mot).
Frame Class 9, Type 0 (“Plus”)
When i armed, motors spins, seems to well react to yaw rc inpout, but to pitch and roll RC input too and when i tilt the frame it’s seems that motors react to pitch and roll angle too. As their are mot 5 and 6 of a hexacopter…???
Servo don’t move to.i’ve tried several servo#_function, RCPassTrought servo move on RC Input but don’t stabilize (seems to be logic…), Aileron and Elevator functions no reaction(RC Input and/or frame orientations).
I can’t find Forward Flap and Right Flap Servo Function, what i missed?
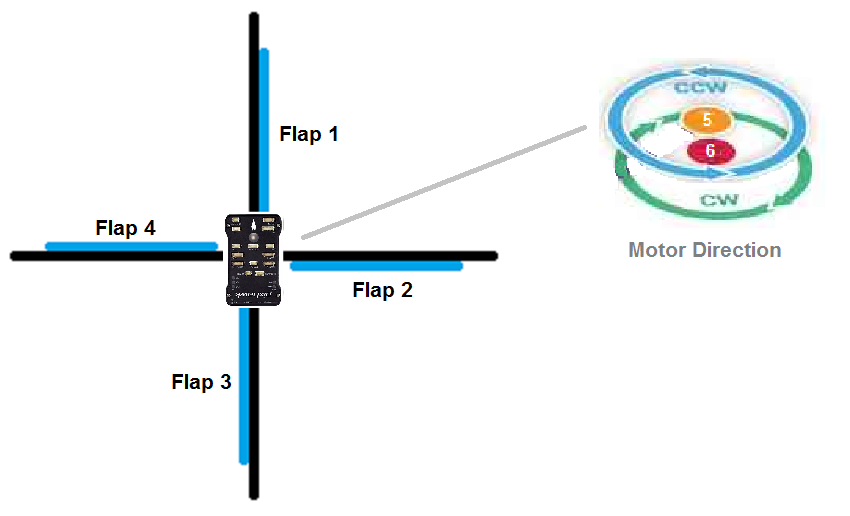
correct motor output is:
actuator -> output function
flap servo 1 - > motor 1
flap servo 2 - > motor 2
flap servo 3 -> motor 3
flap servo 4 -> motor 4
motor ccw -> motor 5
motor cw - > motor 6
as per image from the wiki
ps motor throttling up when you tilt could be angle boost, you can disable it with a parameter





 and it’s seems that i have the same issue as AeroGen.
and it’s seems that i have the same issue as AeroGen.