Hello all
I’m new to the Ardurover but have some experience in PX4.
I’m having a lot of trouble getting Ardurover to work in AUTO mode, although it works fine in Manual mode (turning, throttle, all OK). I’ve spent many hours with this, googled everywhere, read forums, but can’t sort it out, so desperate for some help.
I’m using a Pixhawk with APM:Rover 3.1.1 with a tank style rover, with ESCs that don’t have reverse.
RCMAP_PITCH=1
RCMAP_ROLL=2
RCMAP_THROTTLE = 3
RCMAP_YAW = 4
( My Taranis radio is set in Mode 2 , Pitch channel 3 and Roll channel 2 )
I’ve connected the ESCs to PWM Main 2 and Main 3 ( Main 1 and Main 3 combo doesn’t work)
I’ve had to set RC2_TRIM and RC3_TRIM = 900. If I set them to 1500 when the Pitch stick is centered the rover advances, and I can only stop it when moving stick to bottom.
I can’t arm with radio, only thru Mission Planner, but that’s not an issue at the moment for me.
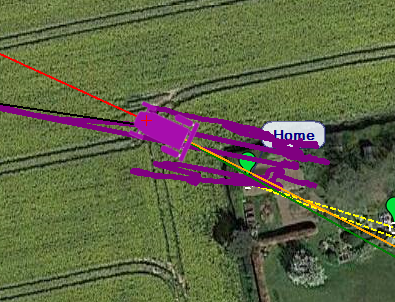
I have a number of waypoints set and I can load them back and forth from Mission Planner to Rover and viceversa. I press Auto when more than 10m away from the waypoint.
When I press AUTO nothing happens, the rover gives an initial stutter and then nothing. If I rotate it in place sometimes the tracks move briefly like if it wanted to change heading, but it’s a very subtle movement.
When I try STEERING mode the behaviour is quite difficult to understand. One of the tracks on the side starts moving and stopping, but I can’t correlate it to heading or anything I do with the sticks. To be fair I don’t really understand what Steering is supposed to do so a bit confused here…
I have tried all the settings in the different pages, http://ardupilot.org/rover/docs/tuning-steering-and-navigation-for-a-rover.html and others… but I have not found a combination that works.
EKF fails continuously, don’t know why, so disabled it so that arming check passes.
These are my settings:
ArduRover_params.param (8.7 KB)
Any help much appreciated.