If one were to build a new vtol today what’s one of the more recommended platforms? I have a new Matek H743-Wing V3 FC in my parts box and am looking for a summer project.
Thanks!
@tridge
I’m currently testing precision landing in SITL, trying to send landing targets using both MAVLink 1 and MAVLink 2 commands.
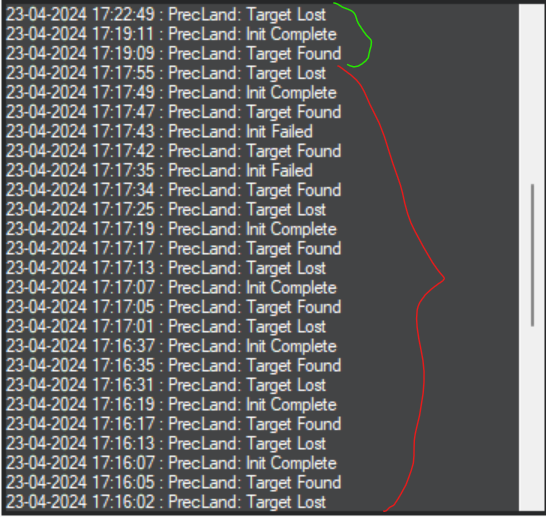
With MAVLink 2, Mission Planner gets ‘Target found’ and ‘Init Complete’ messages, keeps detecting until I stop.
However, when using MAVLink version 1, I consistently receive ‘Target Lost’ messages despite continuous command input. It intermittently reinitializes and fails again, sometimes it fails in initialization.
I’m seeking clarification on whether there are any limitations when using MAVLink 1 command.
@pramod it depends what frame you are sending. If sending MAV_FRAME_BODY_FRD then it needs some fields which are MAVLink2 extensions, so won’t work.
What example message fields are you sending?
(post deleted by author)
(post deleted by author)
Use the openmv ‘’mavlink apritages landing target “example program,it runs well on Arducopter firmware,but it doesn’t work on Arduplane . VTOL GCS message show"Init Complete AND Target Found”, VTOL no responding .Same precise landing parameters,Even installing a rangefinder in vtol .My English is not good. It may be difficult to understand.
arducopter firmware version :4.5.1stable
arduplane firmware version :4.6.1 dev and 4.5.1 stable
flight control :cuav v6x
rangefinder :tfmini plus
openmv :openmv h7 plus ,5640 sensor
[mavlink_apriltags_landing_target :mavlink_apriltags_landing_target 无人机通过mavlink协议实现apriltag定点降落 · OpenMV中文入门教程)