Hey Guys,
my second quadplane had its qloiter maiden today. standart pids.
Everything worked as expected, but the “yaw” performance is not good.
its sluggy and the plane is not “stiff” enouth trying to stay at the right headding, so i tryed to raise the P values had 3 flights in the log, everytime i rased the value gets better. Any tips how to improve that more?
Thanks a lot!
I found with my Ranger-Ex quadplane the default value for Q_A_RAT_YAW_P (0.18) was far too low. It would take about 15 secs to do a full 360 rotation. I have set this at 0.4 now and it rotates much more quickly.
i raised the Q_A_RAT_YAW_P to 0.4 , no big change.
it seems like the YAW controler is “flighting” against someting. sometimes if you yaw to the right on the tx, it will not follow, or it will follow but after stick is neutral it will go back were it was. maybe a mechanical problem?
and idea ? logs of the flight (second log is the more interesting, first one was with the wing cam, bad cg and not balanced…)
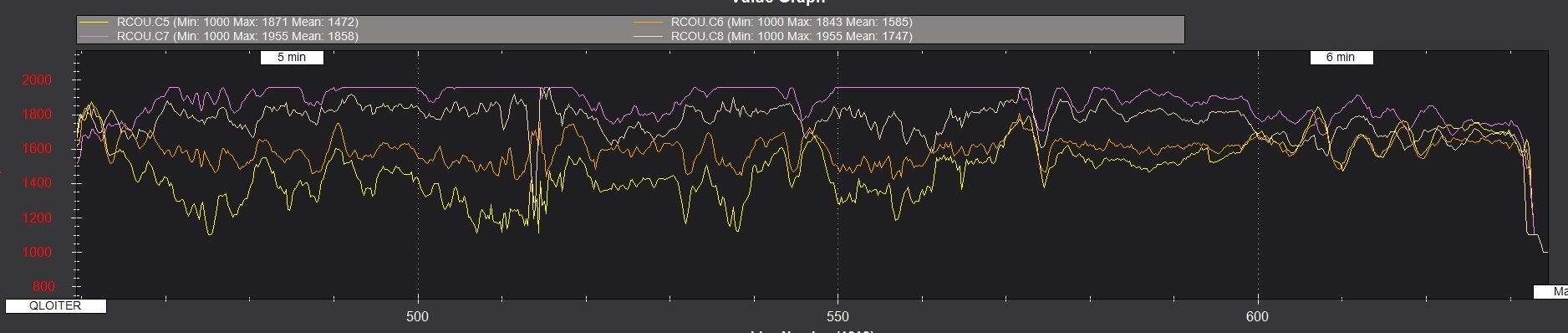
interesting is also that motor rc out 5 and 6 have lower means. i think thats my yaw problem
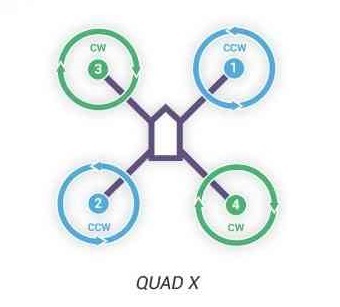
so motor 1 and 2 are turning slower… what to do mechanicaly about that?
any advice?