Hey Greg, just curious, how did you attach the square carbon tubes to the wing?
In addition to the same tubes you use, I used this 1.5mm thick carbon fiber sheet: http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=24964, split it in two trapezoids, one for each side, and glued it to the wing. This seems a bit too much and I’m thinking of cutting some more to clear the under wing for cleaner airflow.
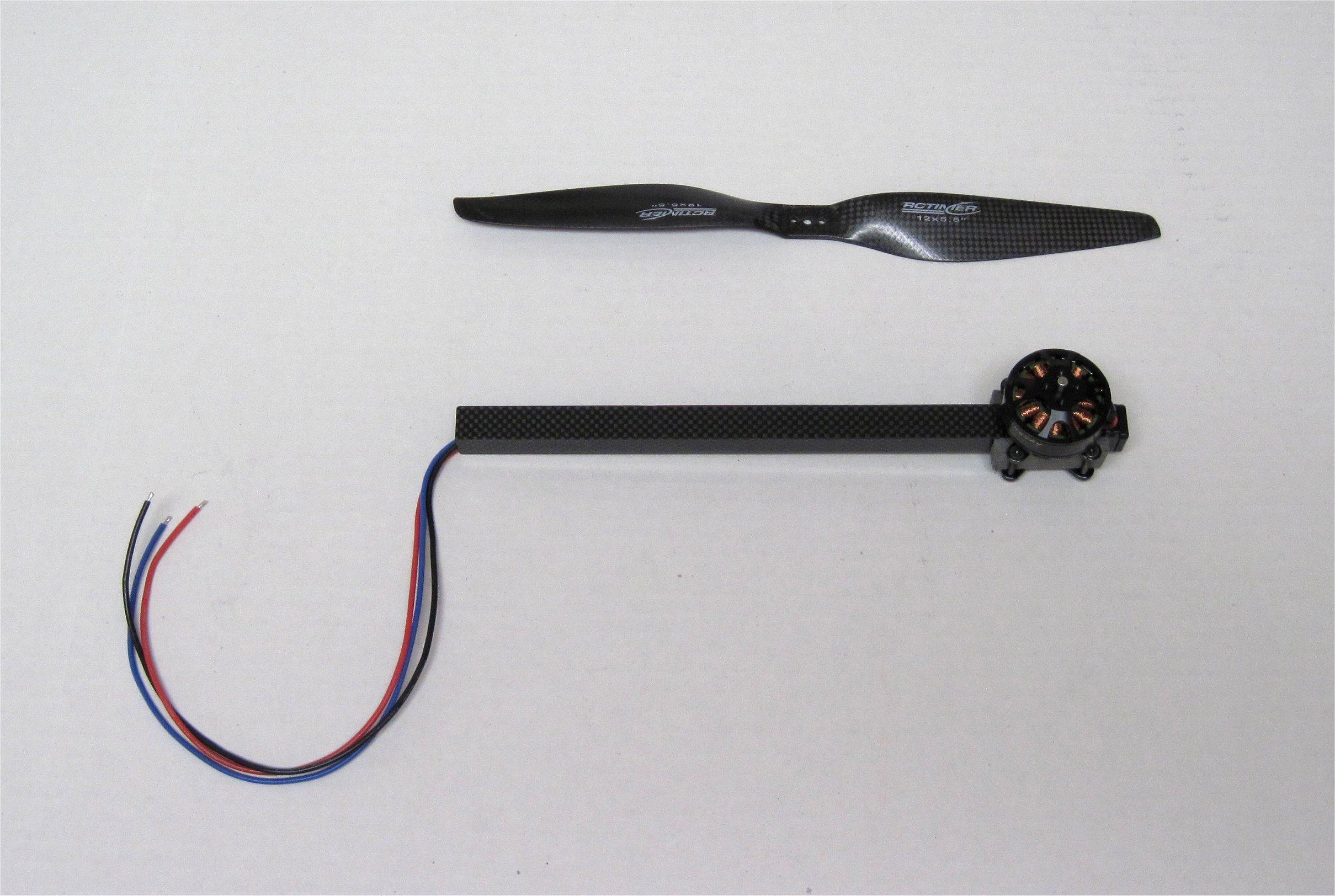
My plan is to use SunnySky X3508 700kv motors with 12" RC Timer t-style props on a 4s 8AH Lipo pack. Here is some information that I based my decision on.
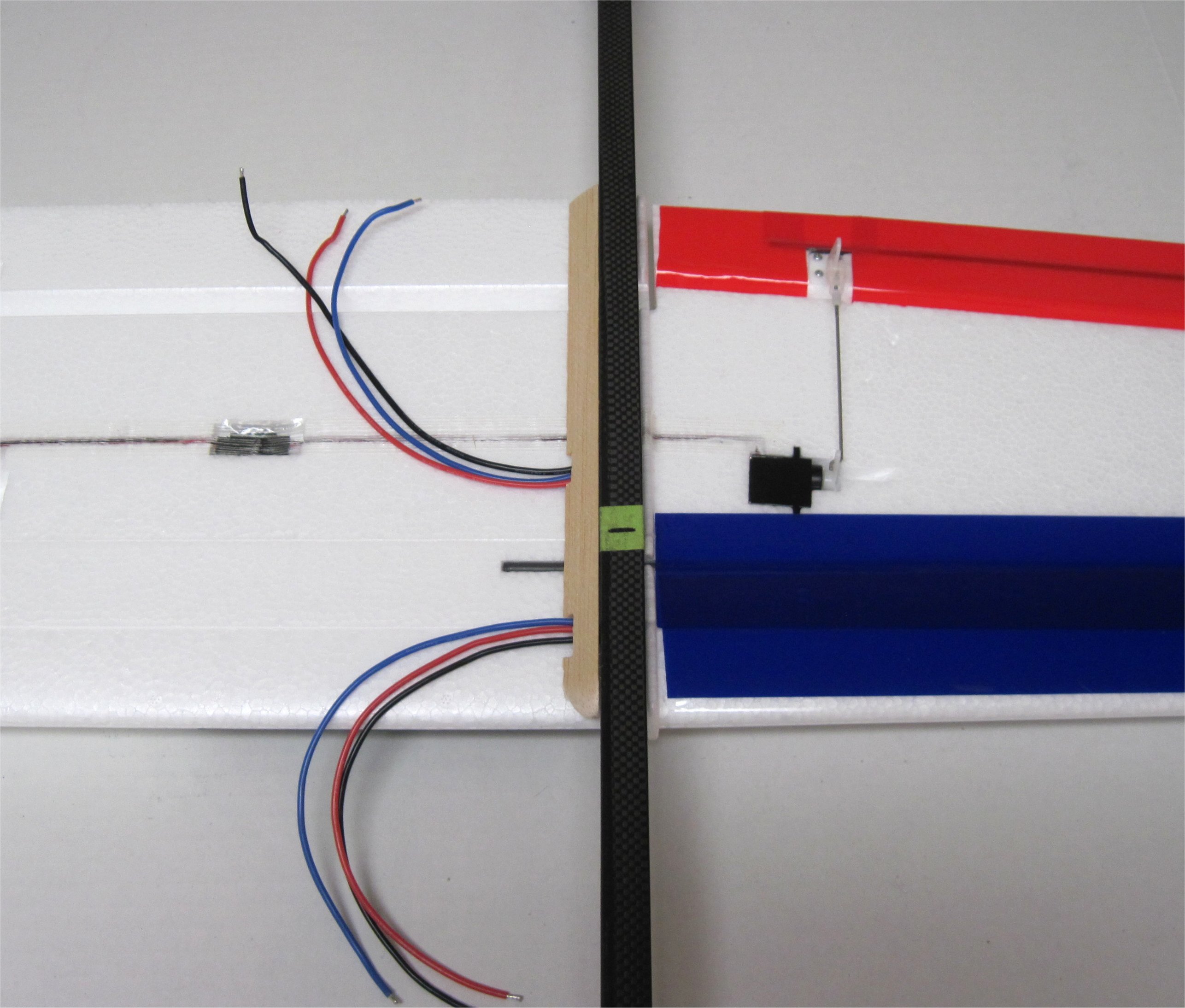
I prepared one of the 15x15x800mm square tubes for mounting on the wing by first marking the center line with tape so it can be glued in place over the CG. I decided to use Foam-Tac since it also adheres nicely to carbon and balsa. The carbon tube aligns itself with the CG marking at the exposed wing tube and the foam ridge between the flap area and aileron area. For extra security, I’ve added a custom cut right-angle piece of balsa stock to counter any rotational forces.
I should be able to glue things together soon.
The whole assembly should provide minimal drag for forward flight.
Thank’s Greg for share all this invaluable info, I follow in silence , I have a cuadplane in my wishlist.
What about to use racer esc that looks much lighter than standard ones?
On this project, I don’t think weight is much of an issue so I went with my proven RC Timer ESCs from many Pixhawk projects. The 45-amp rating is quite excessive so perhaps the 30-amp version is a better choice for lower weight. I wasn’t sure yet where I will place the ESCs so perhaps no cooling is needed on a 45-amp rating. However, I suspect that I will place the ESCs in the wings flush with the bottom surface.
Some people have called the Volantex Ranger EX a stall-proof plane. I don’t know if this is true but the low speed tolerance of the design makes it a good choice for a QuadPlane. I can test a QuadPlane all winter long in a paved parking lot. Fun stuff!
I glued the carbon tube and balsa wedge to the wing separately and it worked very well. I did the gluing in two stages and weighed down the carbon tube during the drying period with a 2.5lb plate. The balsa was then painted black.
The result seems very strong. I tested it with a reasonable amount of force and feel confident that it won’t come off in flight.
Hi Bob,
Welcome! It will be raining in Rochester this weekend so I’ll get back to working on the Ranger EX QuadPlane conversion. Our flying season is over now so it will be fun to focus on a QuadPlane project that I can test all winter long in a plowed parking lot at a park down the street.
You mention problems with the first flight. Did you write up what they were? From your mods I assume it was related to thrust angle and wheels. Any other pointers for a new build?
Thanks
Bob,
My first post in this thread has 4 images showing the various needed changes to the stock Ranger EX. The plane needed some larger wheels and the gear mains swept forward a bit to prevent tip overs on ROG take-offs. The thrust angle was incorrect and the supplied tractor prop wrong for the built-in thrust offset of the stock motor mount.
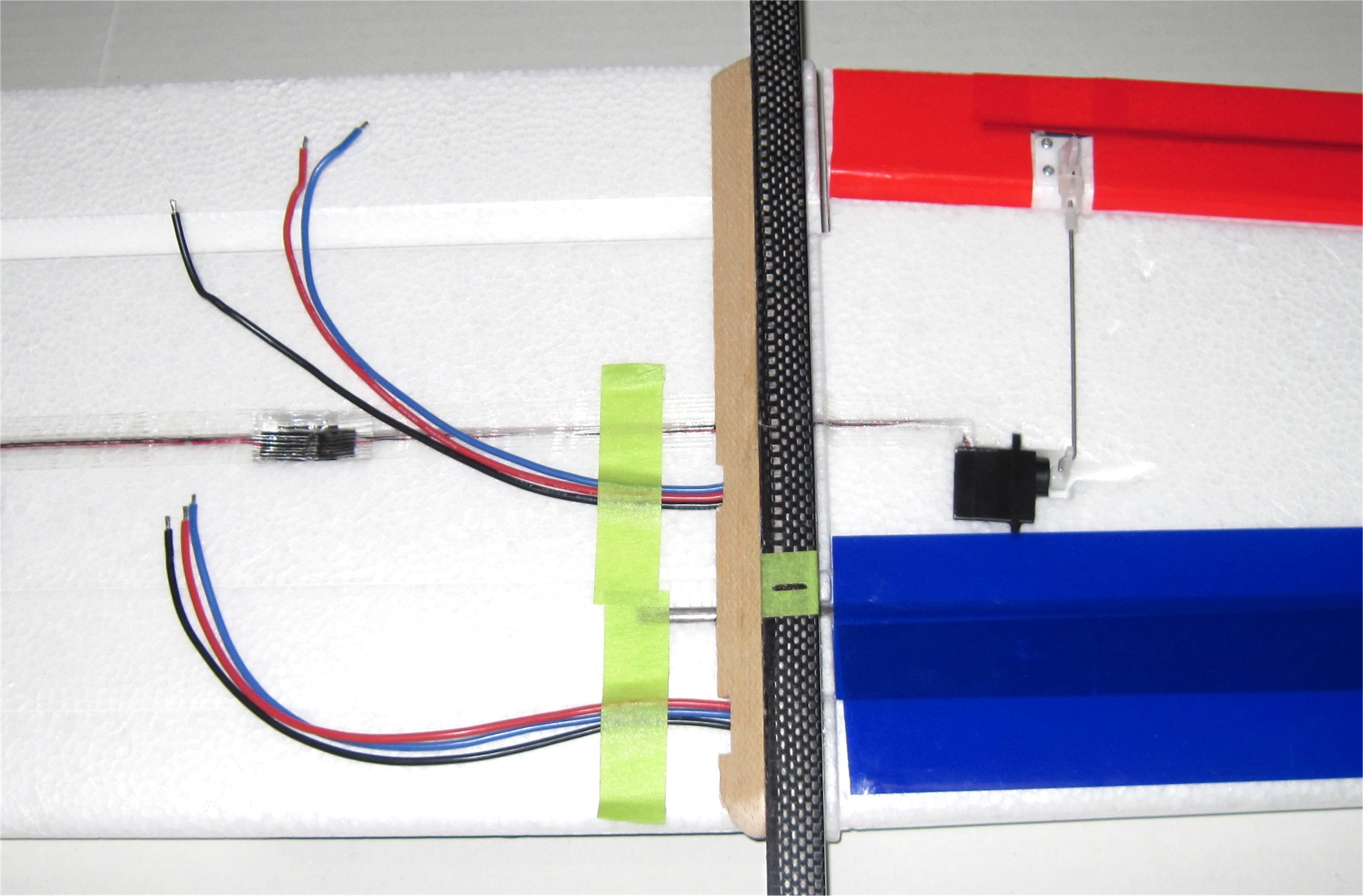
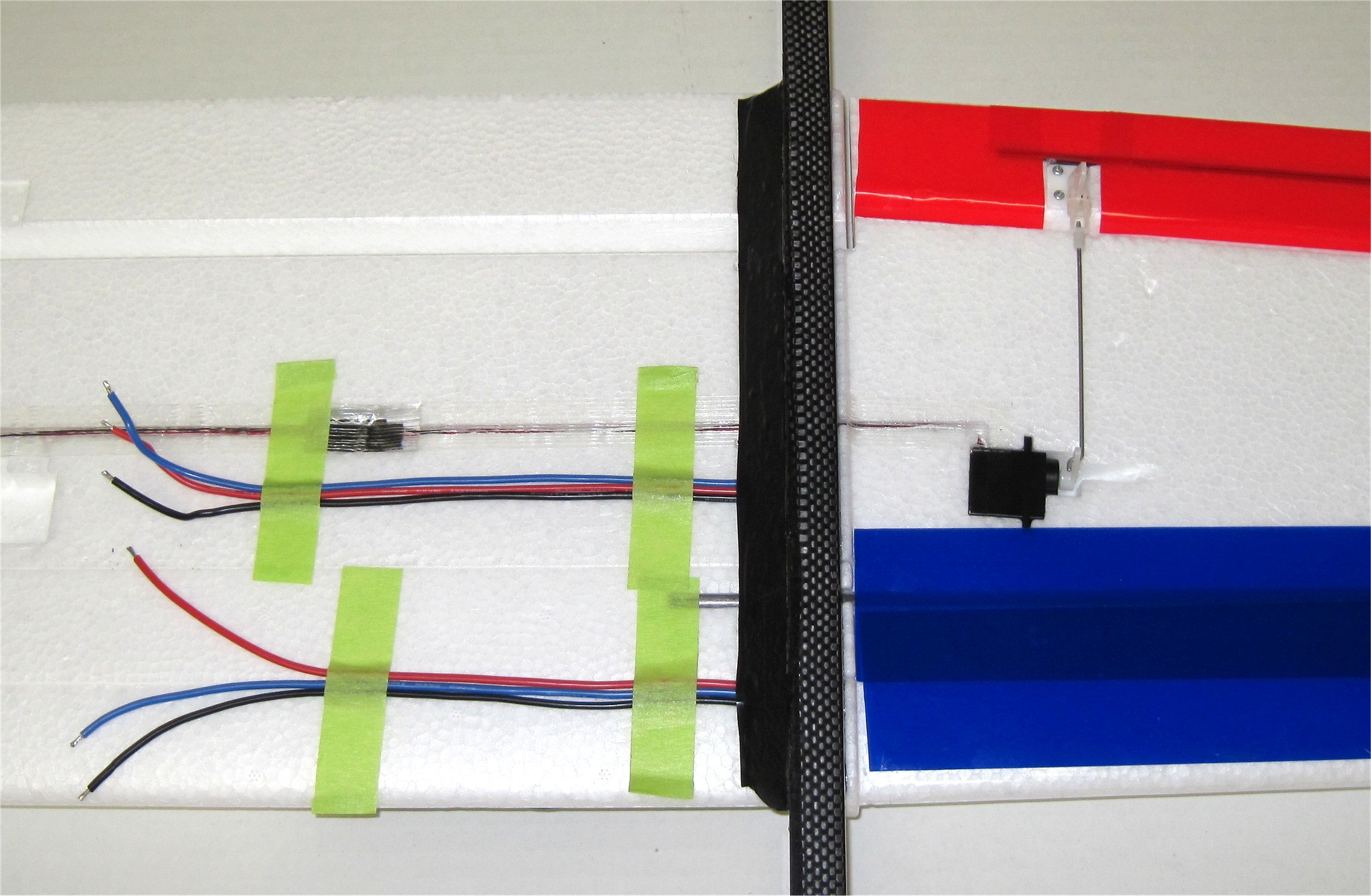
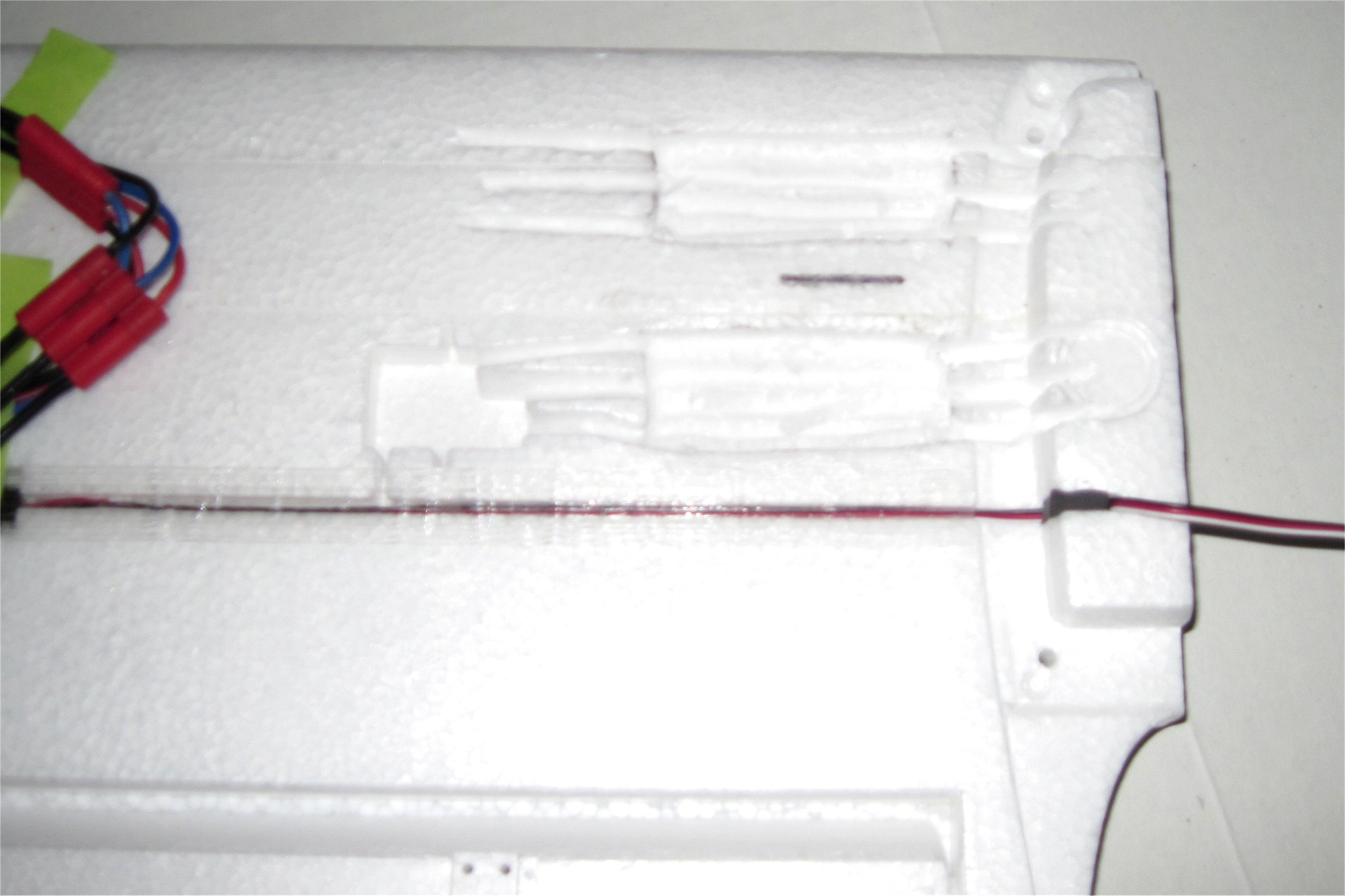
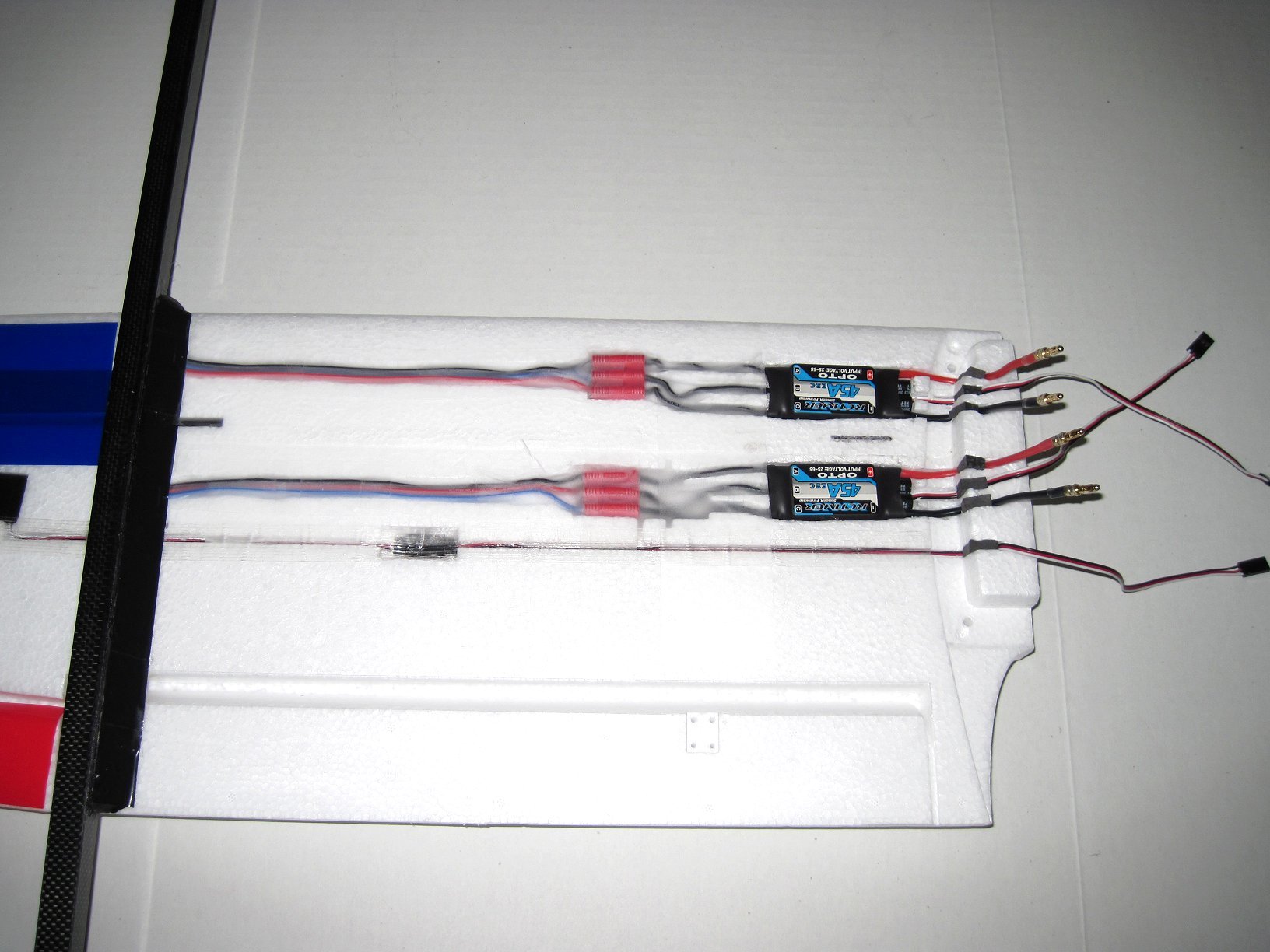
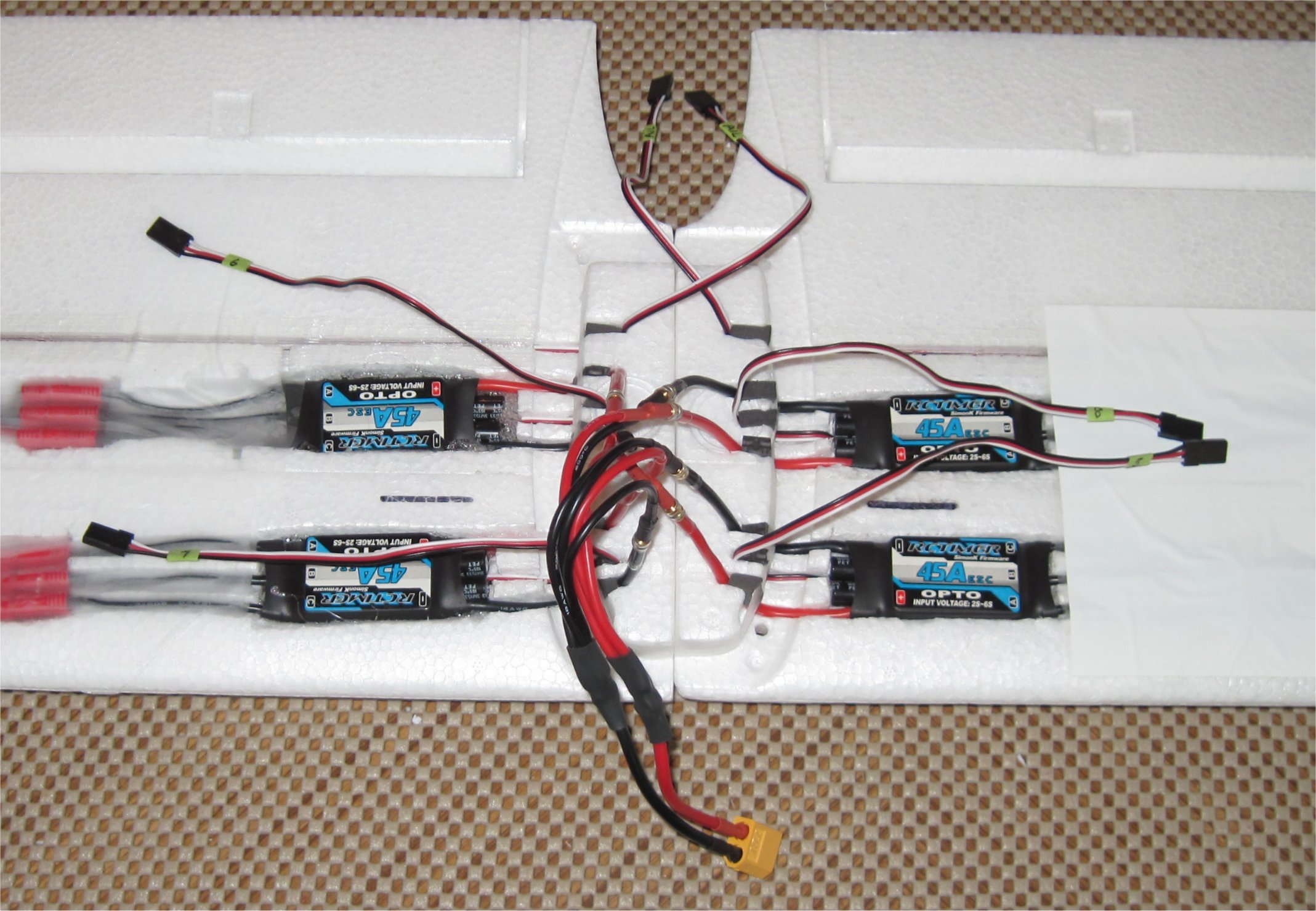
I finished my right wing installation of the ESCs and wires. I decided to use the 3.5mm 3 wire Bullet-connectors from Hobby King so I could solder everything up and easily change the motor direction, if needed, by reversing one end.
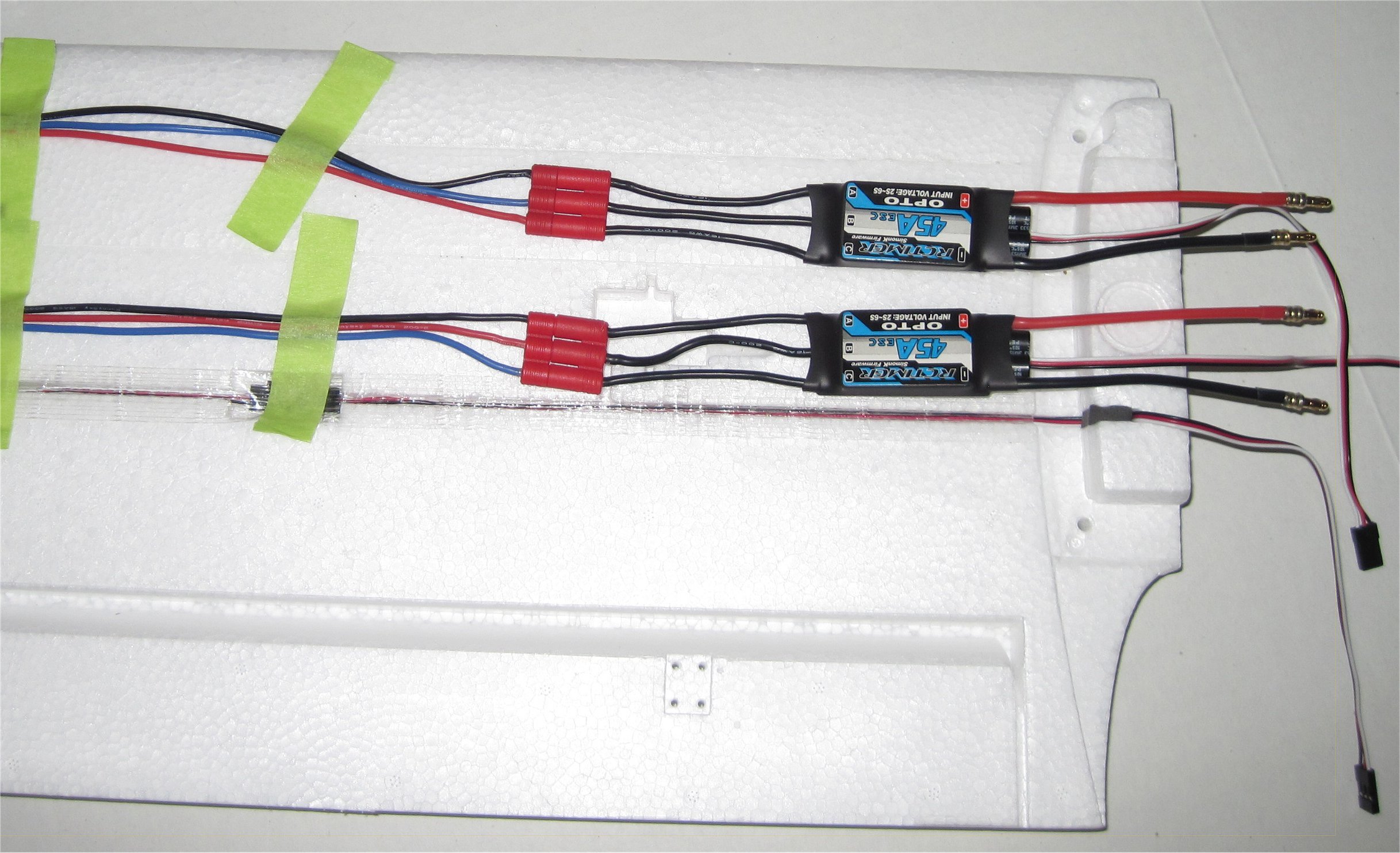
After first checking the motor direction with a spare receiver and 4s Lipo pack, I used a razor knife to bury the wires and ESCs flush (or near flush) with the bottom surface of the wing. A tip here is that the 3.5mm bullet connectors that power the ESC will plug directly into a Lipo pack with an XT60 connector. Since my ESCs are OPTO-isolated, I also needed a 5v receiver pack to power the receiver. The ESC then gets 5v from the receiver throttle channel.
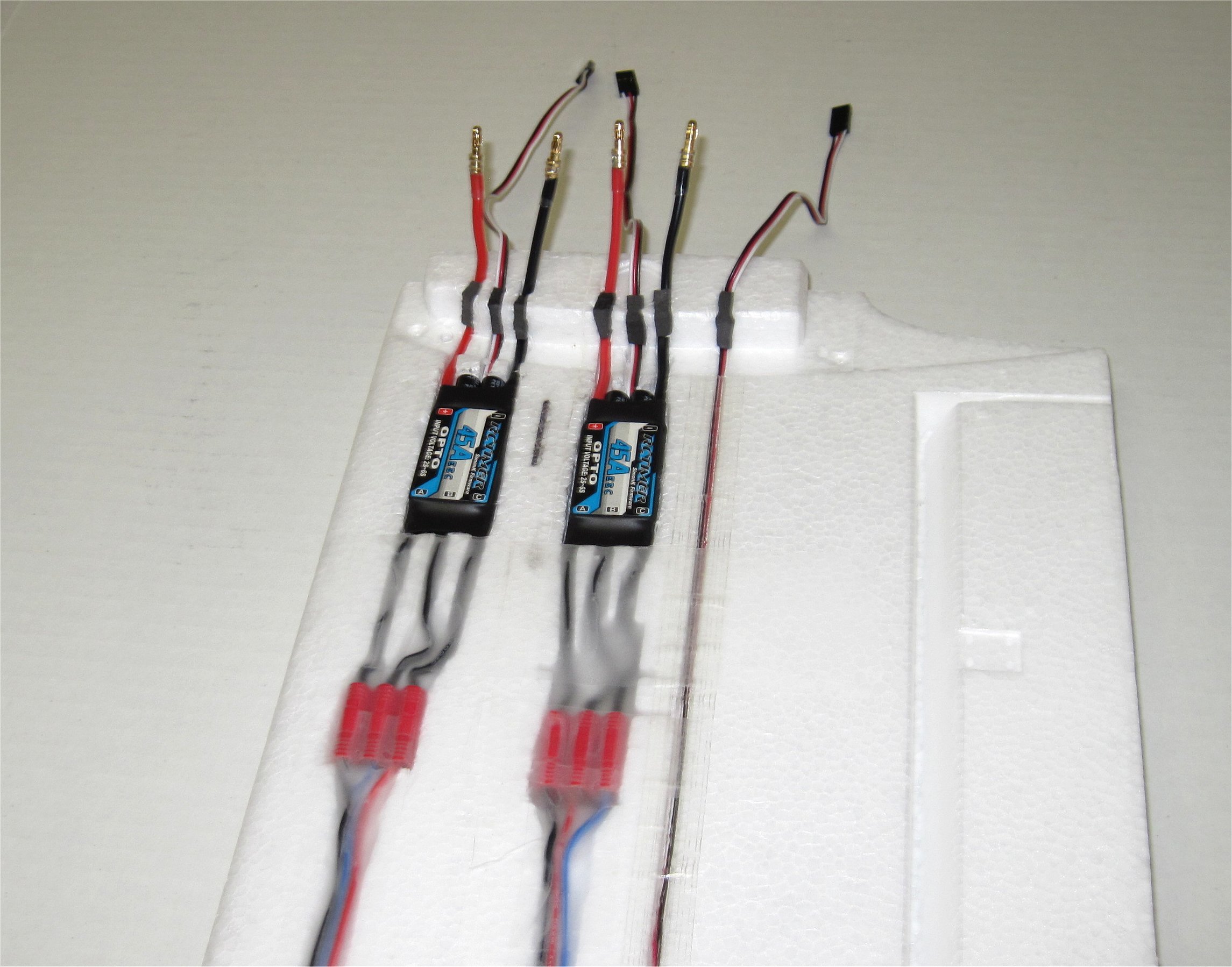
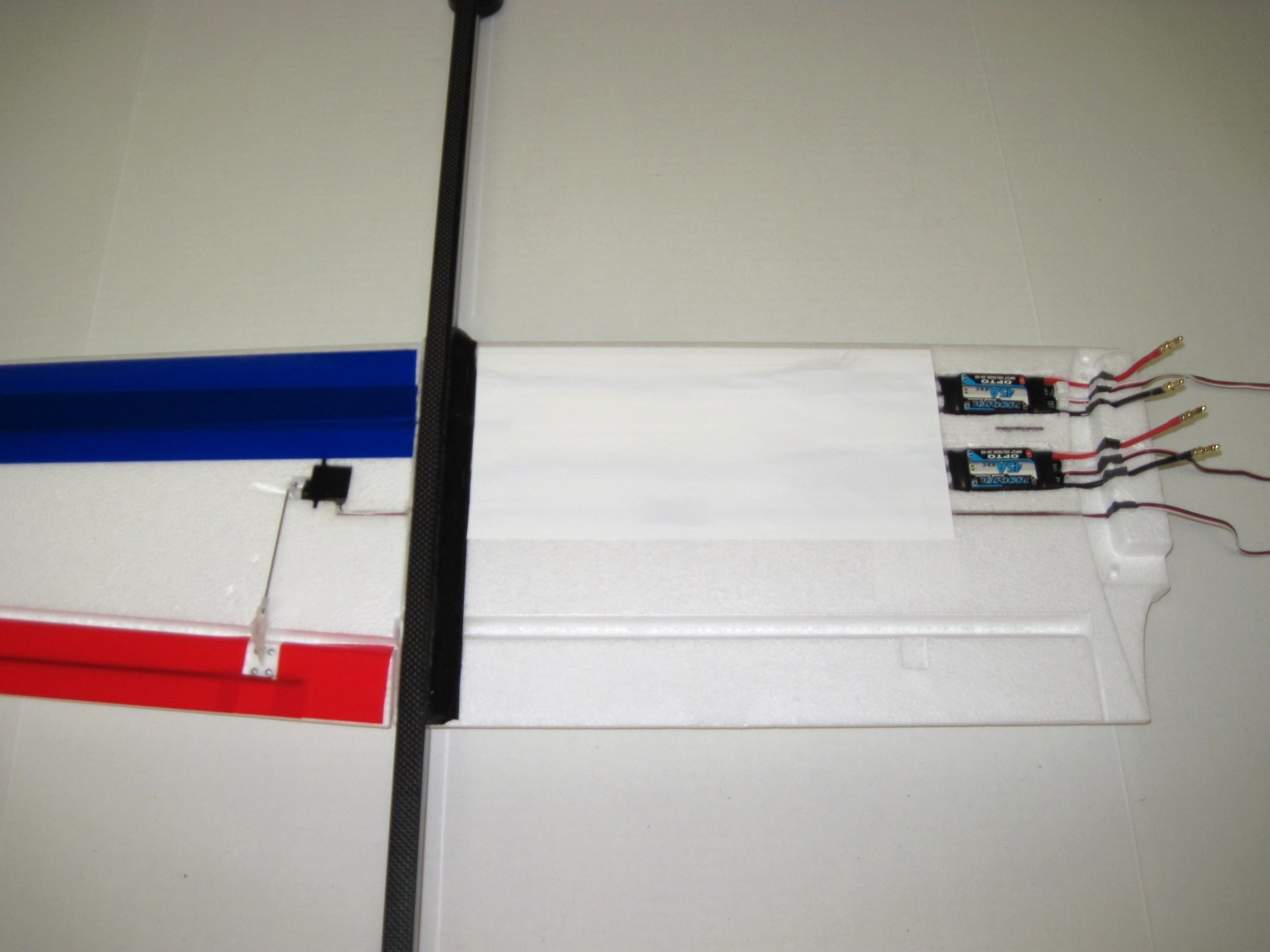
The ESCs were glued in place on the bottom using Beacon 3-in-1 foam glue and the 3-wire motor connectors with servo tape. I then covered the wires and connectors with Blenderm surgical tape which sticks very well to the Ranger EX foam. Lastly, the wires and connectors were covered with a piece of white Monokote trim sheet.
The ESC power leads and servo leads were buried flat with the surface of the center wing area so that it fits properly into the fuselage. To hold the wires in place, I used small square pieces of flooring foam that I cut from a larger piece.
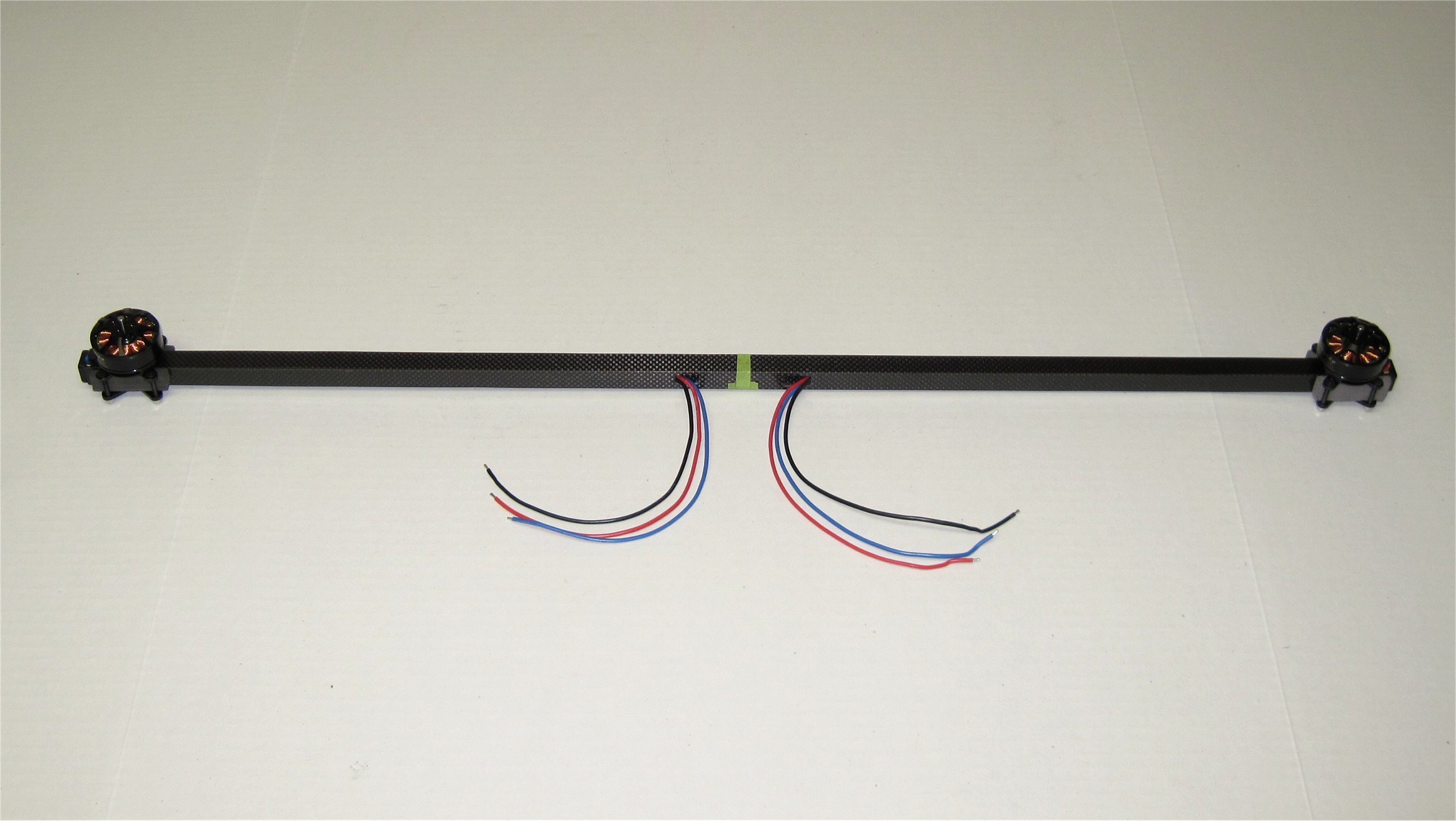
In preparation for my hover test this weekend (since the weather looks nice) I finished the gluing and wiring on my left wing half but skipped the final cosmetic finishes on the balsa post and Monokote trim covering. Hobby King sells a 3-pair or 6-pair adapter cable from 3.5mm bullet connectors to XT60 so you need to adapt them for the 4-pair version shown below. The #14 wire on the XT60 connector works well on my Tarot 650 Sport quadcopter (same power system) so I didn’t change it here as the hovering duration needs to only be a few minutes.
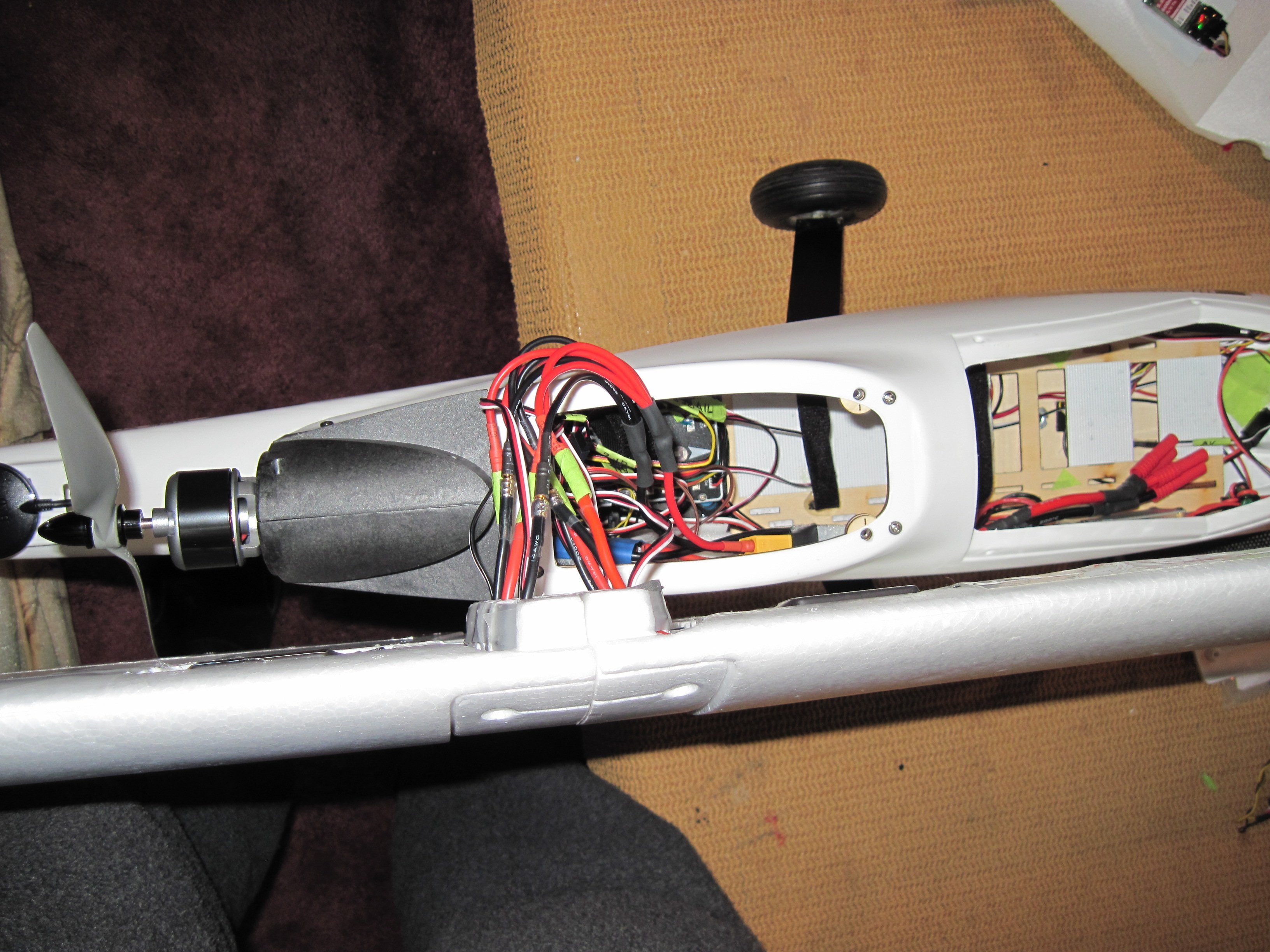
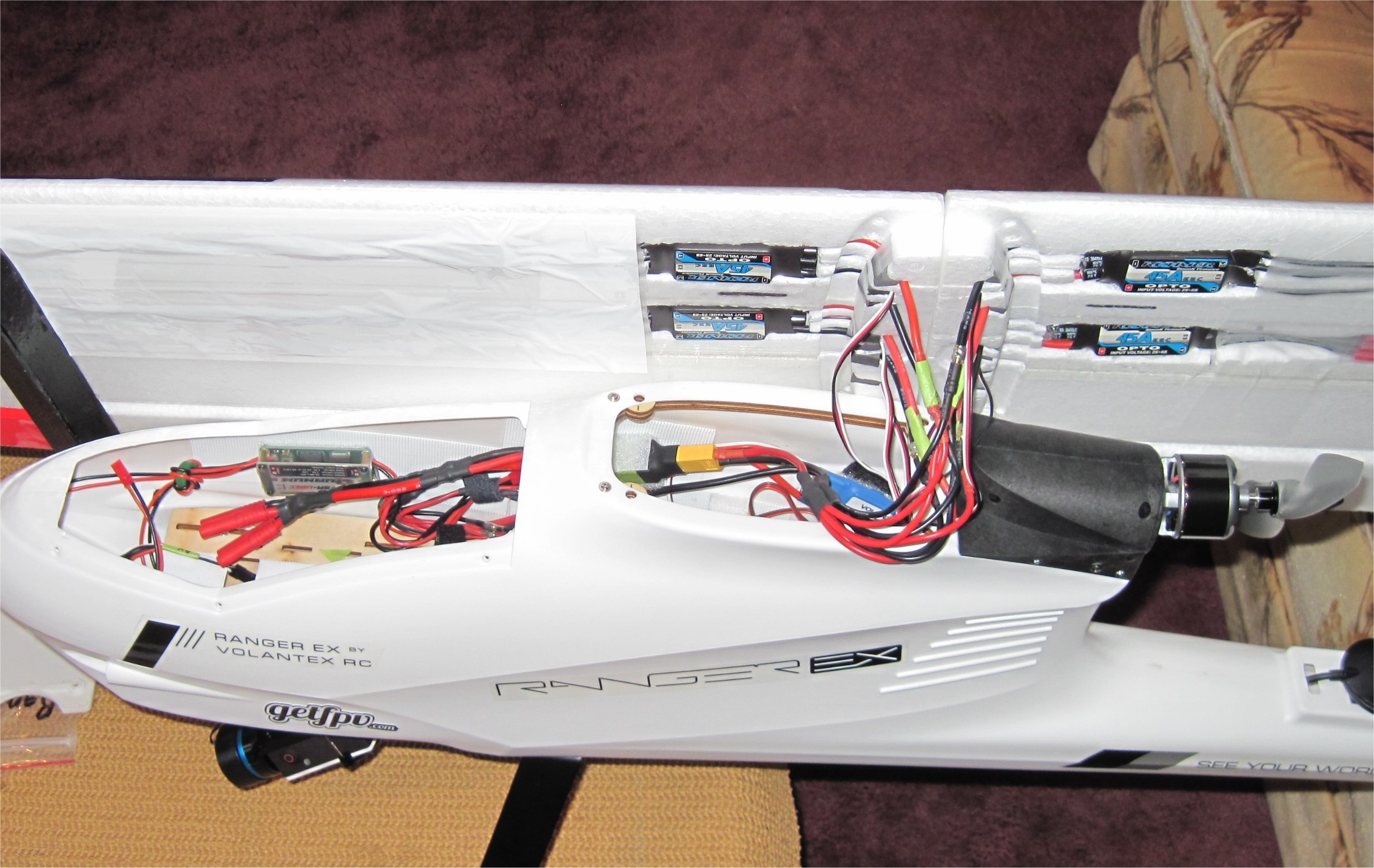
To connect the 4 ESC control cables, I used four 12" servo extenders plugged into the Pixhawk channels 5-8. Recall that the QuadPlane motor position of 1-4 maps to outputs 5-8 on the Pixhawk. Everything is easily connected or disconnected for travel. The wires fit nicely in the spacious Ranger EX fuselage.
The weather was nice today so I decided to try an initial hover in my backyard. Before taking the Ranger EX outside, I calibrated the QuadPlane ESCs using the Q_ESC_CAL=1 procedure since it is easy for me to disconnect power to the ESCs…even with the wing on. The procedure worked great!
As it turned out, the default settings for Q_PIDs on Plane v3.6.0 were rather odd and did not work well on my initial hover tests. The 800mm carbon tubes wobbled up and down, front to back rather forcefully. Although the Ranger EX would not lift off under these conditions, I thoroughly tested my glue joints using Foam-Tac. I’ll have to check the Q_PIDs on my Bix conversion since I didn’t make any changes there.
Here were my default Q_PIDs for Roll and Pitch:
Q_A_RAT_PIT_D,0.022
Q_A_RAT_PIT_FILT,0
Q_A_RAT_PIT_I,0.224
Q_A_RAT_PIT_IMAX,0.4
Q_A_RAT_PIT_P,0.39
Q_A_RAT_RLL_D,0.004
Q_A_RAT_RLL_FILT,0
Q_A_RAT_RLL_I,0.15
Q_A_RAT_RLL_IMAX,0.3
Q_A_RAT_RLL_P,0.3
After some iterative testing using my laptop for a 900MHz telemetry link, I ended up with these Q_PIDs and the Ranger EX would hover!
Q_A_RAT_PIT_D,0.005
Q_A_RAT_PIT_FILT,0
Q_A_RAT_PIT_I,0.15
Q_A_RAT_PIT_IMAX,1
Q_A_RAT_PIT_P,0.2
Q_A_RAT_RLL_D,0.005
Q_A_RAT_RLL_FILT,0
Q_A_RAT_RLL_I,0.15
Q_A_RAT_RLL_IMAX,1
Q_A_RAT_RLL_P,0.2
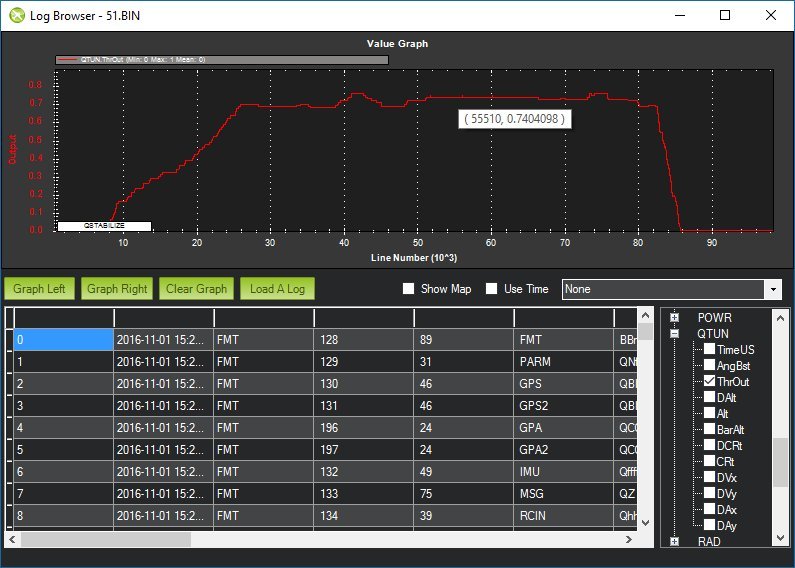
I also changed my Q_M_SPIN_ARMED to 0 because I don’t like the props spinning at low throttle. My Mauch Current Sensor hasn’t arrived yet so I didn’t measure the current draw when hovering. I made a second short hover before I finished so I could see the Throttle MID setting and it is about 740 which is what I expected. The hover test included my 3-axis Feiyu Tech Ultra gimbal and GoPro H3 camera. The Lipo packs weighed 30oz total for my 4s 8AH 25C Nano-Techs.
Greg - looking good. Question - how are you finding yaw authority? Does it not cause the wings to twist badly when the alternate (eg. front left and rear right) motors are doing the lift?
So far I have only tested in my backyard but after changing the Q_PIDs it seems to be ok and I can control the yaw reasonably. I will know more after this weekend and post a video where I can test it better in an open area. My backyard is rather tight with trees and upper canopy.
Before the Q_PID changes, the the wing was twisting along the CG since the plane was never designed to handle these forces. The Q_PID changes, although roughly done, seemed to help this a great deal. It will be interesting to see how this performs in some wind and determine if the wing needs additional support to reduce the twisting.
I looked up my Q_PIDs for my Bix3 conversion and the main difference I see is that FILT is set to 10 instead of 0. I will have to test this difference. My Ranger EX IMAX parameters are double the Bix3 due to the weaker power to weight ratio.
I did another hover test in my backyard today and the yaw authority is good. I also changed the FILT parameter in the Q_PIDs from 0 to 10 and the hover capability seems fine now. I’ll get a better test in this weekend.
My first test of the Volantex Ranger EX QuadPlane conversion was in my backyard. After making some Q_PID changes, the Ranger hovered nicely in an enclosed area with trees all around and an upper canopy. I tested Q_Stabilize and Q_Loiter modes while yawing 360 degrees using APM Plane v3.6.0
The wind swirled around my backyard but it did not affect the Ranger too much. I had the weathervane enabled and Q_VFWD_GAIN set to 0.05 so I hope to test Q_Loiter mode again in a larger field with constant breeze.
I’m quite surprised that your booms seem to be so rigid without the reinforcing I did on my Ranger’s wing (see the 4th pic in my blog here: https://www.rcgroups.com/forums/showthread.php?t=2680569). My wing is now one piece with the 2 x carbon square tubes running across the middle and all the way to the boom mounts. I really would have expected more wing twist on yours, but maybe the carbon is not necessary after all.
One thing I found with my Ranger is that the Q_A_RAT_YAW_P was far too low at the default value of 0.18. It would take maybe 15 secs to do a full 360 rotation. I have set this at 0.4 now and it rotates much more quickly.
I’m interested in the effect of the “FILT” and “IMAX” parameters you are changing. The parameter list does not explain much at all and Google search does not come up with much. Can you tell me what they do or link me to some further info?
I have seen your conversion design and thought it was quite elegant and professional. However, my goal was to make a simpler and less expensive conversion that may entice others to follow. Using my multicopter experience, my thought was that proper PID tuning should keep the system stable. So far, it seems to be working ok. Perhaps there are construction differences between the Quantum Observer and the newer Ranger EX design. Granted, the wing was never designed to handle these forces.
I checked my Q_A_RAT_YAW_P value and it was already set to 0.4, which is strange because my Bix3 conversion has it set to 0.18. I may have changed it when I was initially getting the Ranger EX to hover. I posted my latest Ranger EX param file below. I have also changed the Q_THR_MID to 740.
You are correct about information on IMAX and FILT being sparse. As for the IMAX value, my understanding is that IMAX is used to prevent an I term build up which can cause an overshoot. Before increasing IMAX to 1, the carbon arms would oscillate like a see-saw. One recommendation for FILT is here in the AutoTune section. Larger copters with props around 13" or larger should have FILT set to 10Hz. Typically, I use this value for RAT_PIT_FILT and RAT_RLL_FILT.



 , I have a cuadplane in my wishlist.
, I have a cuadplane in my wishlist.