Ok. I understand! But it still may be helpful to test out 3.5 just to try out the ‘RawEstimate’ Precision Landing.
I checked the log around 2550s (~42min), and it looks like it is in Auto or Guided mode at this time (rather than Land)?!
Ok. I understand! But it still may be helpful to test out 3.5 just to try out the ‘RawEstimate’ Precision Landing.
I checked the log around 2550s (~42min), and it looks like it is in Auto or Guided mode at this time (rather than Land)?!
yes we fly normally auto missions with a LAND command as the last waypoint. so this was a normal landing as with the LAND mode activated through the transmitter or the Misson Planer.
Andy
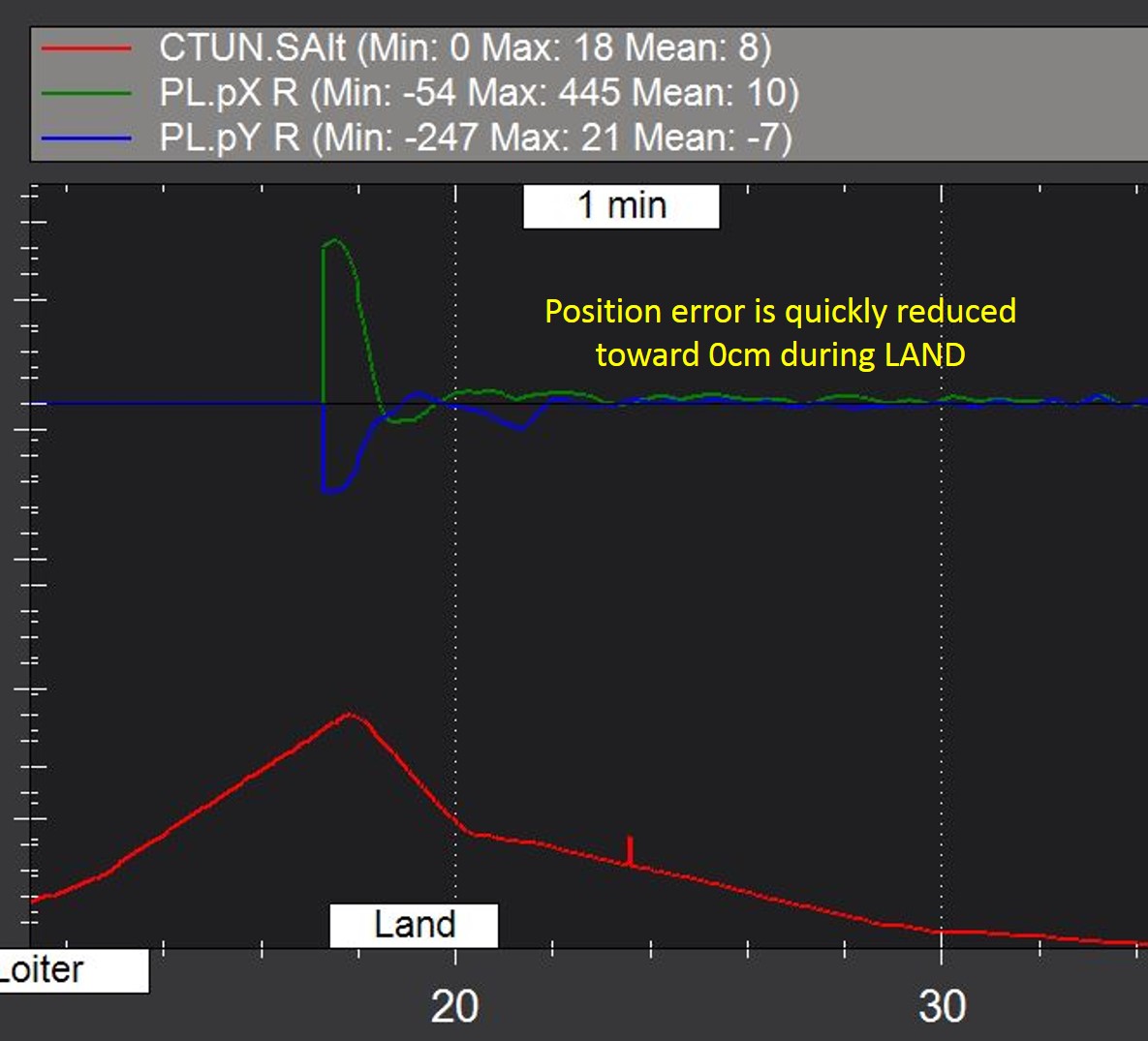
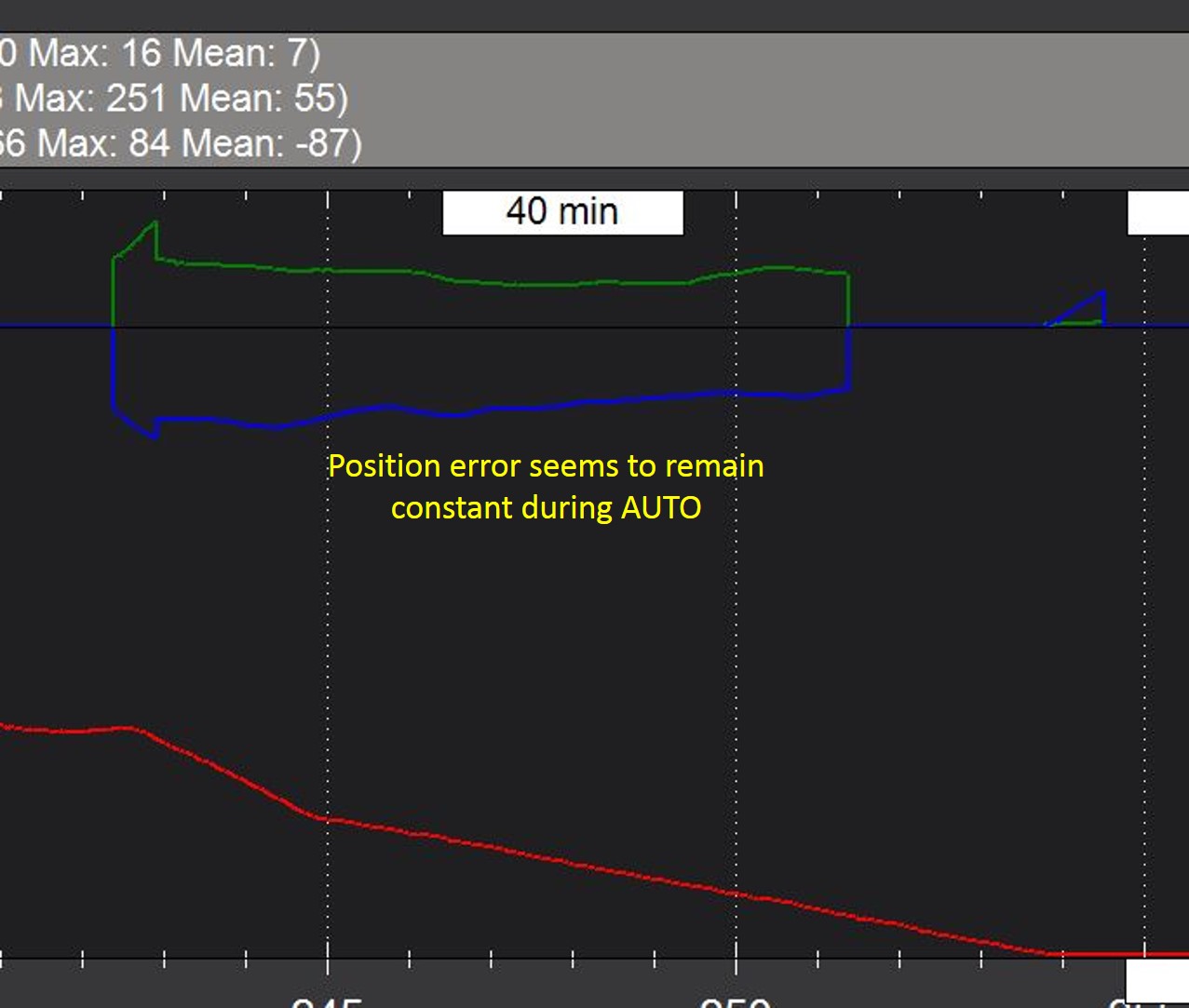
I looked at all of the precision landings in the log (both AUTO and LAND modes). It seems like the precision landing is working properly in the LAND mode landings. However, the copter behaves differently in the AUTO mode landings. Have you noticed this sort of behavior?
By the way, I am not familiar with how the precision landing controls code was integrated into AUTO_land in V3.4.6
Here are two examples (first LAND, then AUTO):
Hi @ThomasSFL
We managed to figure out the problem. We were having some issues on pixy cam side. Now we are sorted.
Thanks for the support
Regards,
Nish
@ThomasSFL, Hey, Thomas. Recently, I test many ways for preland, such as rtk, vision etc. I notice the IRlock can get a really accuracy landing results, I wonder whether it can get 10cm error at RTL mode. The accuracy is really strict as for application use. Or do you have any solutions for getting such results landing?
I looked through several flight logs and no I can’t say that the landing just works with the LAND command and not via the Mission files. We have too many good landings with the mission files so it normally works but like in this log sometimes freaks out and we still can’t figure out why…
Andy
Thank you! I have ordered a rangefinder and it is working now. The TAcq or px py values are non zero now.
Yes, the IR-LOCK system provides reliable detection in all lighting conditions, and accurate landings for most out-of-the-box copter setups.
Some of our commercial clients have achieved 10cm error with their setups. However, this requires extra tuning and testing.
Here is a an example:
Best,
Thomas
Ok. I wish I could be more helpful. I still recommend trying the RawEstimate LAND in 3.5, but I understand that you do not want to permanently switch firmwares at this point.
thx thomas… so we need to try this… on my test equipment I already fly 3.5.x and had never problems so far. hope we can soon change our fleet of drones to the new version.
I tested the suggested method to stream the “found beacon” signal to the ground but still without luck… Could you maybe open a request that this parameter gets implemented into the mavlink stream?
or is it possible to read this out via an external pin on the PIXY so we can sens this pin by either the arducopter or an companion computer?
@ThomasSFL, Thx Thomas.
Could you please give me some hints for extra tuning or testing methods, maybe we could cooperate with each other for making IR-LOCK a best preland tool.
Best,
Debupt
Although not standard usage, With a few modification. you can send distance between copter and beacon to ground station. like this
and you also need to modify mission planner. so that it can show landing_target in tuning window
add some codes in CurrentState.cs
[DisplayText(“Landing target x”)]
public float land_tgt_x { get; set; }
[DisplayText(“Landing target y”)]
public float land_tgt_y { get; set; }
mavLinkMessage = MAV.getPacket((uint)MAVLink.MAVLINK_MSG_ID.LANDING_TARGET);
if (mavLinkMessage != null)
{
var land_tgt = mavLinkMessage.ToStructure<MAVLink.mavlink_landing_target_t>();
land_tgt_x = land_tgt.angle_x;
land_tgt_y = land_tgt.angle_y;
MAV.clearPacket((uint)MAVLink.MAVLINK_MSG_ID.LANDING_TARGET);
}
Do I need to set the parameter that tells my Pixhawk to use the rangefinder “while landing” in order for the IRlock to function? Thanks Jeff
No, just enable prec landing.
Corrado
Hi Thomas,
How can i get reliable detection performance in bright sunlight. My PIXY is too sensitive to sunlight. Even if the beacon doesn’t work the “Tacq” is still 1 in bright sunlight.
Thanks!
Good Day @HIT_WEI
Use the MarkOneV2.0 Beacon. The MarkOne detection is perfectly reliable in all lighting conditions. And you will get zero false detections.
Best,
Thomas
I use this one.Can it be reliably detected?
Unfortunately, you have a clone/fake product, and it definitely does not work.
Official IR-LOCK products come from the IR-LOCK webstore. We ship internationally.