I’m a fairly new Ardupilot user. After first positive impression from a “big” px4 in a 600 class hex’a and losing my naze based 250 I decided to buy a pixracer for my new build.
I’m starting to regret that decision
While setting up the big pix was a big pleasure, setting up pix in a overpowered (ctune hover is at .19-.22 on 3s while a 4s setup is destined) 250 is a nightmare. No matter how an what I set (at least in the standard parameters - all the settings still overwhelm me) the copter is far from stable. A constant wobble always accompany me spoiling the fun.
Today I decided by hand test tune the pids - I lowered all all the way down (P I D) setup the CH6 P tune. Even at a very low P setting, the copter is very soft but still wobbles.
That was a very expensive experience. For the pix I could have purchased almost 3 sp F3 evo boards.
I was on the same boat as you earlier but I was using a Pixhawk micro. The tip is to lower your vibration and right parameters for a small quad. I use Kyosho gel when mounting my pixhawk. I also followed this post by Leonard Hall.
Depending on exactly what your setup is the parameters can vary quite a bit. Here are a couple of pointers.
Starting Parameters:
Make sure you are running 3.4-rc1
INS_GYRO_FILTER,40
ATC_RAT_RLL_FILT,40
ATC_RAT_PIT_FILT,40
AUTOTUNE_AGGR,0.1
AUTOTUNE_MIN_D,0.0005
I find that with esc breaking on I need to drop my rate pids right down.
So keep halving your rate pids on roll and pitch from default until you can take off and not get oscillation. These are the parameters I am talking about here:
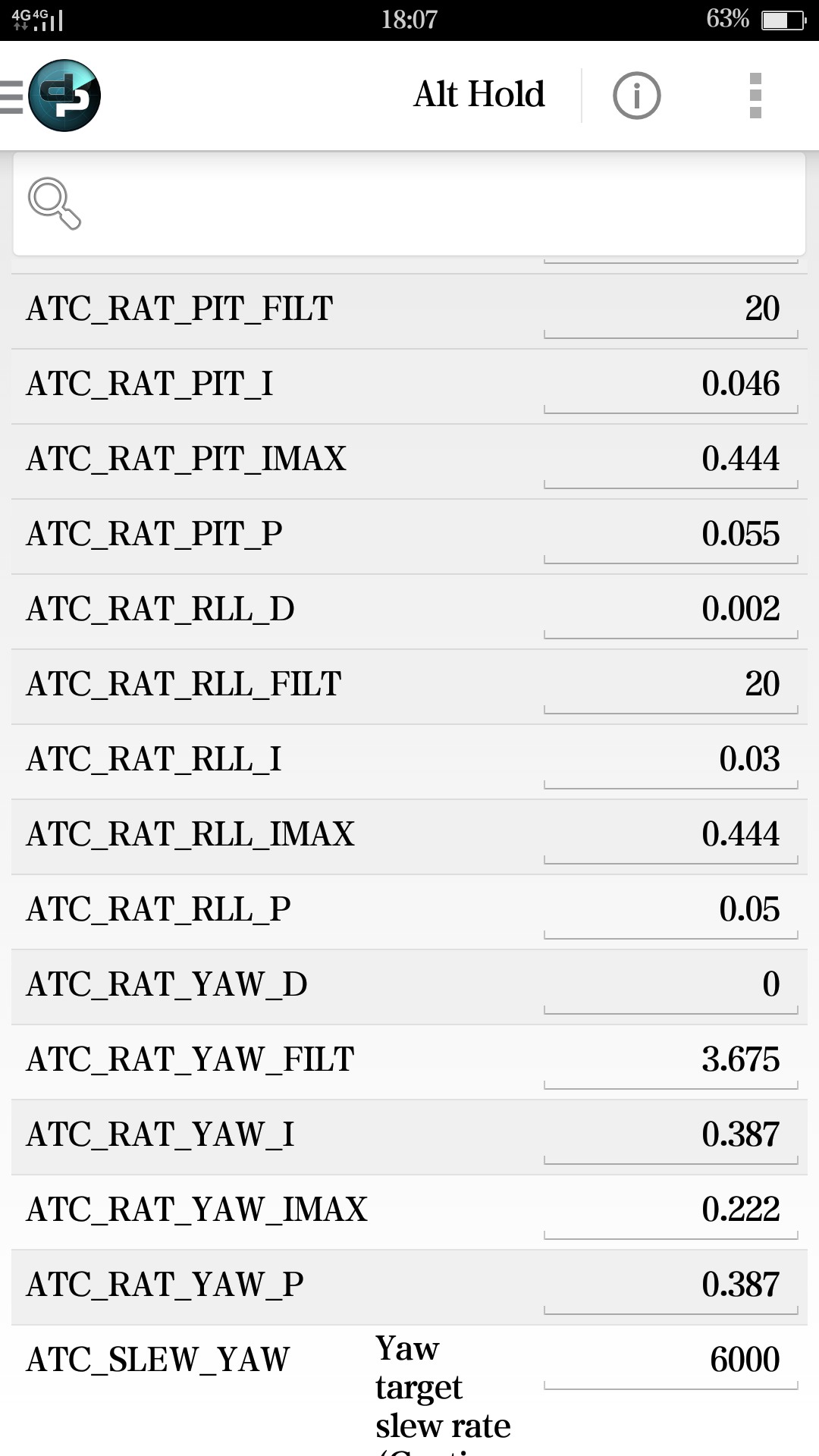
ATC_RAT_PIT_D
ATC_RAT_PIT_I
ATC_RAT_PIT_P
ATC_RAT_RLL_D
ATC_RAT_RLL_I
ATC_RAT_RLL_P
Don’t be surprised if you have to drop the d terms to 1/4 the defaults.
From here you can start doing manual tuning. Increase the D term until you get oscillation then divide by 2 or back it off until you remove the oscillation. Do the same for the P term. Then set the I term to be equal to the P term.
Don’t get me wrong - it does fly. Just not the way it should. There is a wired oscylation - no a wrong word wobble - on the whole range of settings. I can set the P all the way down but the wobble is always there. It acts kind of drunk. It slowly (1-1/2 hz??) dips different ways - and it’s most noticeable when you make it hoover stable. The wobble is different from the usual P oscillations. The P oscillation is constant on an axis. the wobble dips different ways with no apparent scheme.
Yesterday I fallowed your advice. After increasing INS_GYRO_FILTER to 40 the wobble seams to increase it’s frequency. At INS_GYRO_FILTER 80 it starts to resemble the P oscillations but it’s not as predictable.
Also after trying to tune it with the CH6 Opt to “Rate Roll/Pitch kP" from Min to 0.08 it wobbles even at the minimum. Where the copter is far from being flyable as it is very soft and not responsive and still wobbles. When I make it responsible the wobble is still there. When I increase the P father it starts to oscillate the usual P way on top of the wobble. I can get the P oscillation out, make it flyable but with the wobble. Using this guide http://ardupilot.org/copter/docs/ac_rollpitchtuning.html#ac-rollpitchtuning
The only difference is i test it in hand. Arm (in acro), take the copter in hand push the thro to about hoover point, and change the P with the CH6 knob.
After the test I got constant EKF errors and gyro bad health. After reset they are away.
Still did not try to put the racer on a some kind of foam or gel as I don’t have a case for it yet and it would be hard to put it level on a foam without one.
Hello Qemay,
that seems a tüpisches vibration trouble to sein.die small quads are under very hard, so that the vibrations are very hard. we have made very good experiences with velcro under the FC. the drive shafts are not bent. the propeller balancing.
Today I will print myself a case for the pix, and put it on a velcro. I can also try a heli gyro foams. I don’t think I have any msheli gel pads more - because I could try those to.
Leonardthall - you mention ATC_RAT_RLL_FILT ATC_RAT_PIT_FILT- where should I update those - I can not find anything like this on parameters list, and Roll and Pit Filt on extended tuning page are gray and I can not edit those.
Hi,
Newby here (new to Arducopter/pixracer but not new to mini quads)
I just had a horrible experience with an attempted maiden flight on a superlight, over powered quad (diatone blade 180, 1306 motors,3s) with a Arducopter/pixracer.
I pretty much started with the default pid and setting numbers and move all the sliders to the left.
After 4 broken props, I still cannot get it to gently lift off the ground or close to hover.
If you want to try a Beta release I would suggest 3.5Rc5. Install from Mission Planner selecting the “beta firmware” button. I’m flying a Pixracer on a 210 size quad with it and it’s performing well.
Hello
It seems that 3.5Rc5 does not work for me on PixFalcon out of the box.
With 3.5Rc5 I get "Failsave, No Receiver"
But i can see all sticks movements in Mission-Planer.
I moved back and installed 3.4.6 Quad.
Everything works.