I’m using a Spektrum DX9 transmitter. So I think I’m limited to 8 channels. It also will not work with satellites if using a proper receiver.
Check on the ArduPilot documentation for hardware. They always do a good job on mentioning recommended equipment (receivers). I’d say definitely start there.
Thank you again for responding. I’ll read that asap
One things that I am having difficulties with is assigning CH 6 to change altitude hold methods
ie. GPS, Barometric, or sonar (Lidar Lite v3)
I have to do factory reset on one ESC because it’s winding up and down, not instant like the other three motors.
Where can I find ArduPilot documentation for hardware?
Many thanks!
Ahh yes I ran into the same issue while first configuring my esc’s. If what you are referring to as “winding down” is slowing down on its own…it has to do with programming your esc’s to the correct number of lipo cells you are using (common with many esc’s like e-Flite for example). Refer to the esc documentation where it discusses programming based on beeps.
As for Ardupilot hardware documentation: http://ardupilot.org/copter/docs/introduction.html
This is a good place to start. It begins to discuss initial setup and documentation. Many times it provides links to great and recommended resources.
Try also this one which gets into transmitters and receivers:
http://ardupilot.org/copter/docs/what-you-need.html#channel-rc-transmitter-and-receiver
Thank you again,
I’ll read the documentation and do a factory reset on the problem ESC
I’ll post my results later today.
Thanks again!
Make sure you have set the FRAME CLASS in the parameters.
Copter 3.5-rc1 28-Jan-2017
Changes from 3.4.4
- Multicopter firmware consolidated into single binary, users must set FRAME_CLASS parameter (1:Quad, 2:Hexa, 3:Octa, 4:OctaQuad, 5:Y6, 7:Tri)
If your using a QUAD
FRAME_CLASS=1
It just occured to me that I’m less than a few kilometers from two airports. Could this be why it will not arm the motors? Can I turn the airports off for calibration and tests?
I’ve never had an issue on my end.
I’m also getting a “PreArm-Throttle below failsafe” warning.
So I tried to connect a receiver using SRXL, but It will not recognize the receiver. do you need to change any attributes on the Pixhawk for it to work?
Ok, So I splurged on a Taranis X9D transmitter and L9R receiver. Ive seen people get success with that combo.
Is there a setting in the pixhawk to use S.BUS?
Nope.Plug and play.SBUS to RCIN.
Internal Taranis calibration first followed by Pixhawk/Mission Planner radio calibration and you should be good to go.
The Taranis is a fantastic bit of kit for the money.
Agree with Jagger…I have a Taranis and X9D. Works like a charm.
It really is good. I have 14ch’s working in Mission Planner.
But I’m afraid I may have left out a Failsafe or Pre-arm check
What is the failsafe message MP is showing? Usually it provides a reason: compass calibration, safety switch, etc.
That’s where I got confused. every now and then I get a no receiver warning, but it works in radio calibration.
At the right hand end of that little bar under the HUD is a tab called MESSAGES.Have a look in there and it will have a list of all mavlink messages in that boot session.It should specify a failsafe.
Sorry for the delay, I got caught in a pile of work.
Now I have one more problem in the prearm check. No RC…
But I can calibrate the transmitter.
I’m using Taranis X9D with E9R extended range receiver.
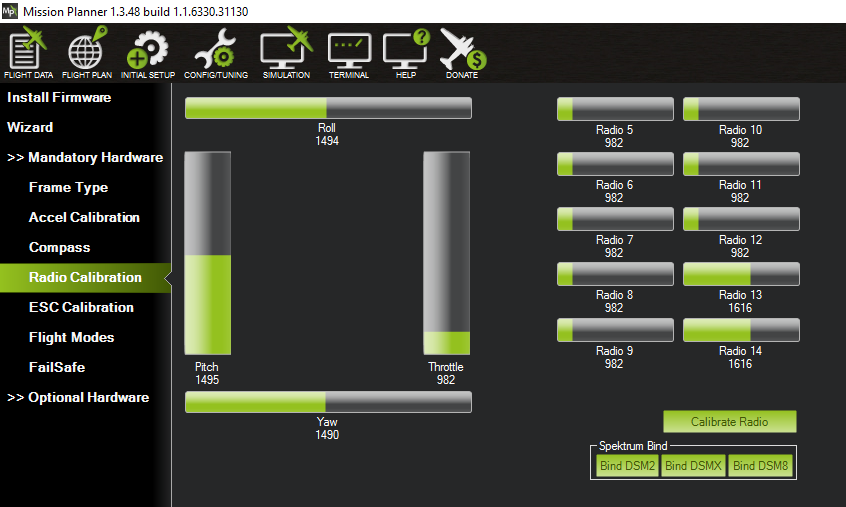
Here is a screenshot of the transmitter calibration. There seem to be extra channels.
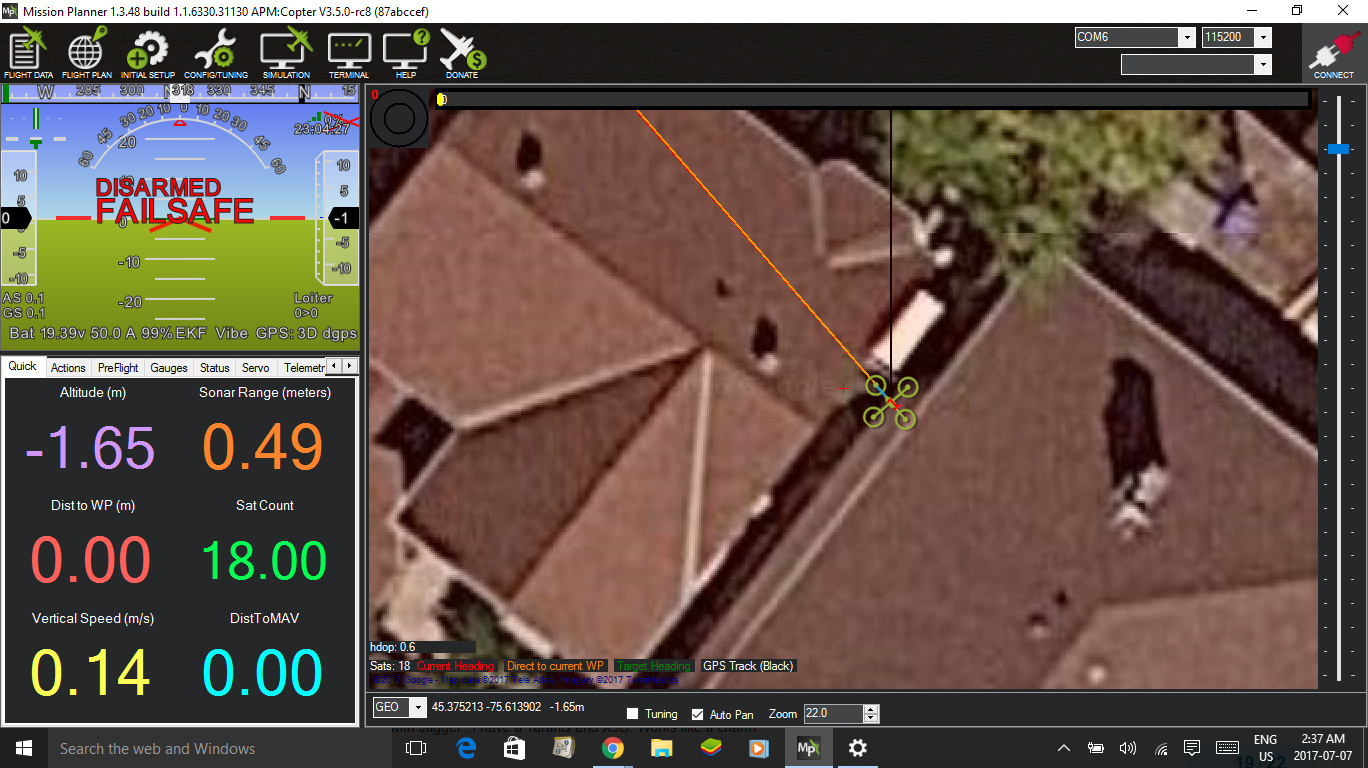
The other problem I’m having is that the Pixhawk has no power except when connected via USB. As soon as I remove USB (with battery power), the GPS and Pixhawk turn off.
Here is what was in my message log:
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: Compass not calibrated
PreArm: Compass not calibrated
EKF2 IMU0 is using GPS
EKF2 IMU1 is using GPS
EKF2 IMU0 Origin set to GPS
EKF2 IMU1 Origin set to GPS
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: GPS speed error 1.0 (needs 1.0)
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: GPS speed error 1.6 (needs 1.0)
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: GPS speed error 1.5 (needs 1.0)
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: GPS speed error 1.6 (needs 1.0)
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: GPS speed error 1.5 (needs 1.0)
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: GPS speed error 1.5 (needs 1.0)
PreArm: Compass not calibrated
PreArm: Compass not calibrated
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: GPS numsats 5 (needs 6)
PreArm: Compass not calibrated
PreArm: Compass not calibrated
u-blox 2 HW: 00080000 SW: EXT CORE 3.01 (107900)
u-blox 1 HW: 00080000 SW: EXT CORE 3.01 (107900)
PreArm: Check FS_THR_VALUE
PreArm: fence requires position
PreArm: Fence enabled, need 3D Fix
PreArm: Compass not calibrated
PreArm: Compass not calibrated
GPS 2: detected as u-blox at 115200 baud
GPS 1: detected as u-blox at 115200 baud
EKF2 IMU0 tilt alignment complete
EKF2 IMU1 tilt alignment complete
EKF2 IMU0 initial yaw alignment complete
EKF2 IMU1 initial yaw alignment complete
PX4v2 00360035 30365109 31353833
Frame: QUAD
APM:Copter V3.5.0-rc8 (87abccef)
PX4: 33825946 NuttX: 1a99ba58
Initialising APM
Barometer calibration complete
First off how are you powering the Pixhawk ? The 21 has two dedicated ports for power.
Throttle failsafe - set the value to around 965.
I’d flash 3.5.0 stable on it as well.