Can’t seem to find this info anywhere - which of the IMU’s are damped? Got the PH2.1 in the air yesterday and surprised to find less vibration from IMU3 than the first two - I was under the impression that the 3rd IMU was not on the damped board, so would expect it to suffer more from the vibes. Frame is a largeish quad, 16" props…
I am sorry if this is dumb, but I cannot find the link to the analysis tool you are referring. I have written a simple C program which takes a log and creates *.m file. Then I use matlab to analyze the results. But that is a lot of hassle. The tool will be much simpler.
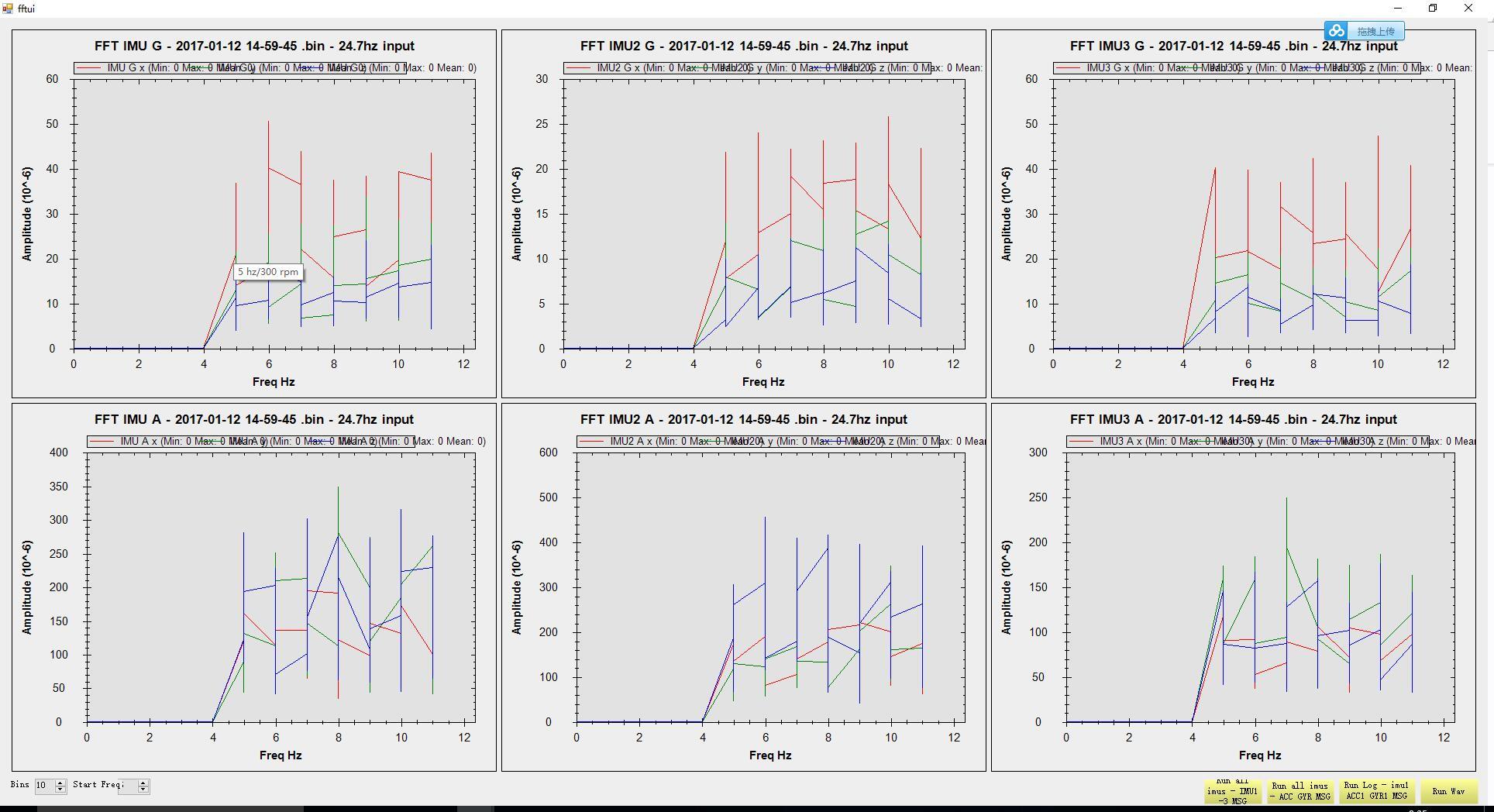
Ctrl-F on MIssion Planner opens a window, in which is a button labelled ‘FFT’, which gives the analysis options. My logs didn’t produce anything from the IMU data, so I assume a different log bitmask is needed to get it working. Have not yet found much more info than that though…
Unfortunately I haven’t got anything to compare it with here so not sure what to read into the analysis at the moment - will have a dig through the forums…
So, the FFT above was with the FC mounted to a damped plate, with a 12ah 6s battery. Foxtech Hover 1 frame but with beefed up bobbins and reduced travel in the damping system to around 1mm in x and y and less in the z axis. If you’re not familiar with the frame, it is a folding quad with a battery plate hanging from 8 bobbins, and a plate for the FC mounted at bobbin height. Others have already noted that the damping system causes issues when the mass attached to it is too large. Large deviations between des pitch/roll/yaw and actual. Particularly yaw in this case.
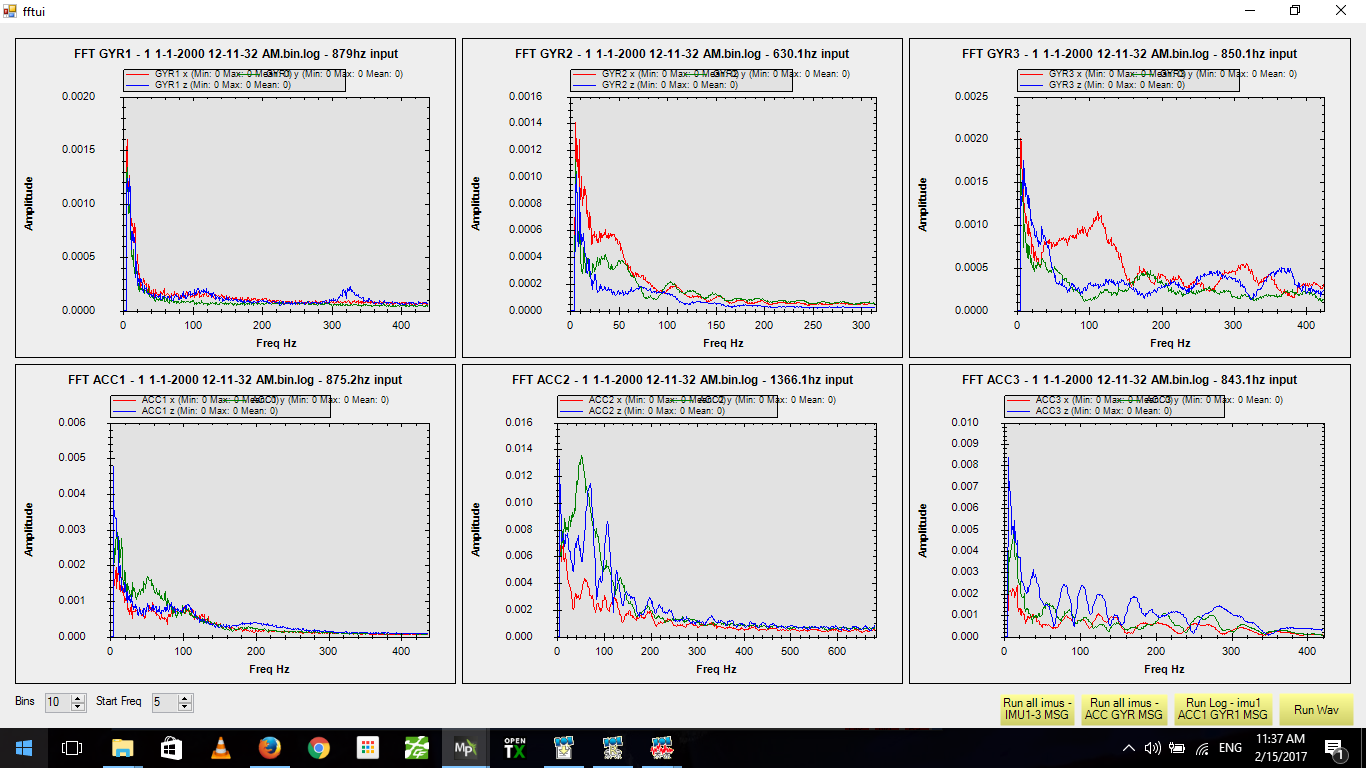
So remounted the PH 2(.1), now hard mounted with VHB. Here is the FFT:
And it appears that there is the ~80hz resonance that was reported in the vibration thread…
Think I might take the FC out again and give it a tap against a hard surface while logging.
The wav function in the FFT function in mission planner makes me want to dig out my measurement microphone and have a look at the sound of the quad in flight.
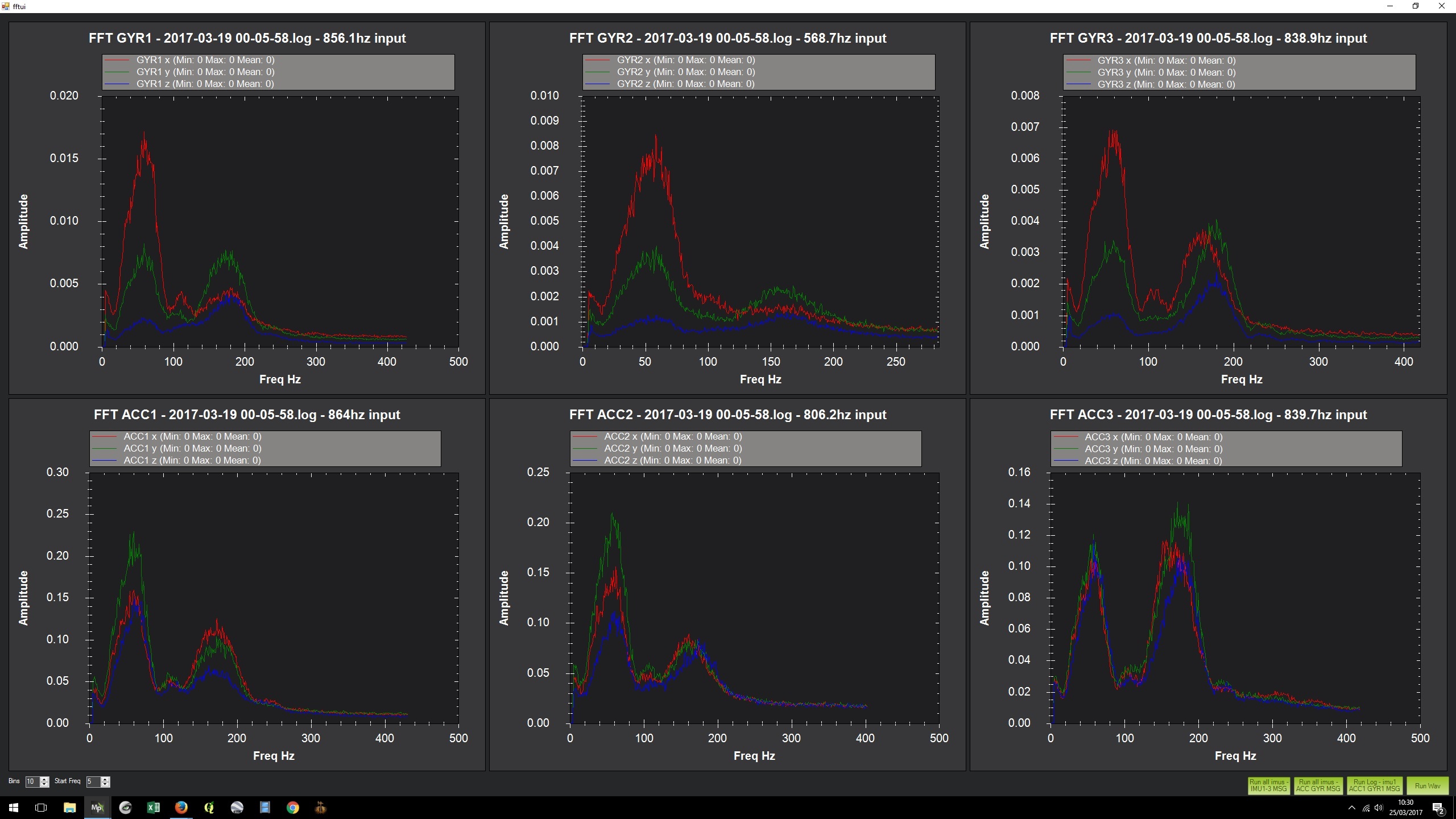
Had a bit more time to fiddle. Remounted the FC with some Sekisui double sided foam pads. It seemed to fly better, but the FFT analysis shows an increase in amplitude of the vibrations on the accelerometer data. FFT analysis from the data from a (very long) autotune session:
when i see the fft data of my pixhawk,i find it is hard to see the f of vibration. now i find the reason, the log rate of imu is 25Hz,i need to log it at 400hz.
I am reading along
lots of good work going on here Charlie has shown how to read the logs, do you want to try following his suggestions on looking at the data?
Quick update, confirmation that imu3 is not damped, also a good explanation of the FFT function, can be found in the Michael Oborne MIssion Planner Gems video fron the Ardupilot unconference here: https://www.youtube.com/watch?v=lZxDsO0ViDY
the part on the use of the FFT function starts at around 16:30 min though the rest is well worth watching…
though I am still a bit puzzled by the apparently lower vibrations on IMU3 in this setup…
I suppose comparing the acc3 and acc1+2 data it, appears that the ~180 Hz spike (stronger in the acc3 dataa that the acc 1+2), is being reduced by about half by the PH2.1 internal damping. The approximate 50-60Hz band, on the other hand, seems to be being amplified by the PH2.1 internal damping, presumably this is the natural/resonant frequency of the Cube 2.1 internal damping system…?
@Charlie_R@proficnc Is there any more information here? I’m seeing the exact same issue with a ~700mm quad with 13" props. I’m also confused as to why IMU3 would have such lower noise. Additionally it seems like ArduPilot’s EKF is using either IMU1 or 2 as the primary core, not IMU3, even though it seems to have significantly lower vibe. I get that we might be hitting some harmonics of the damping, but I still don’t understand why IMU3 would be so noise-free.