Hello,
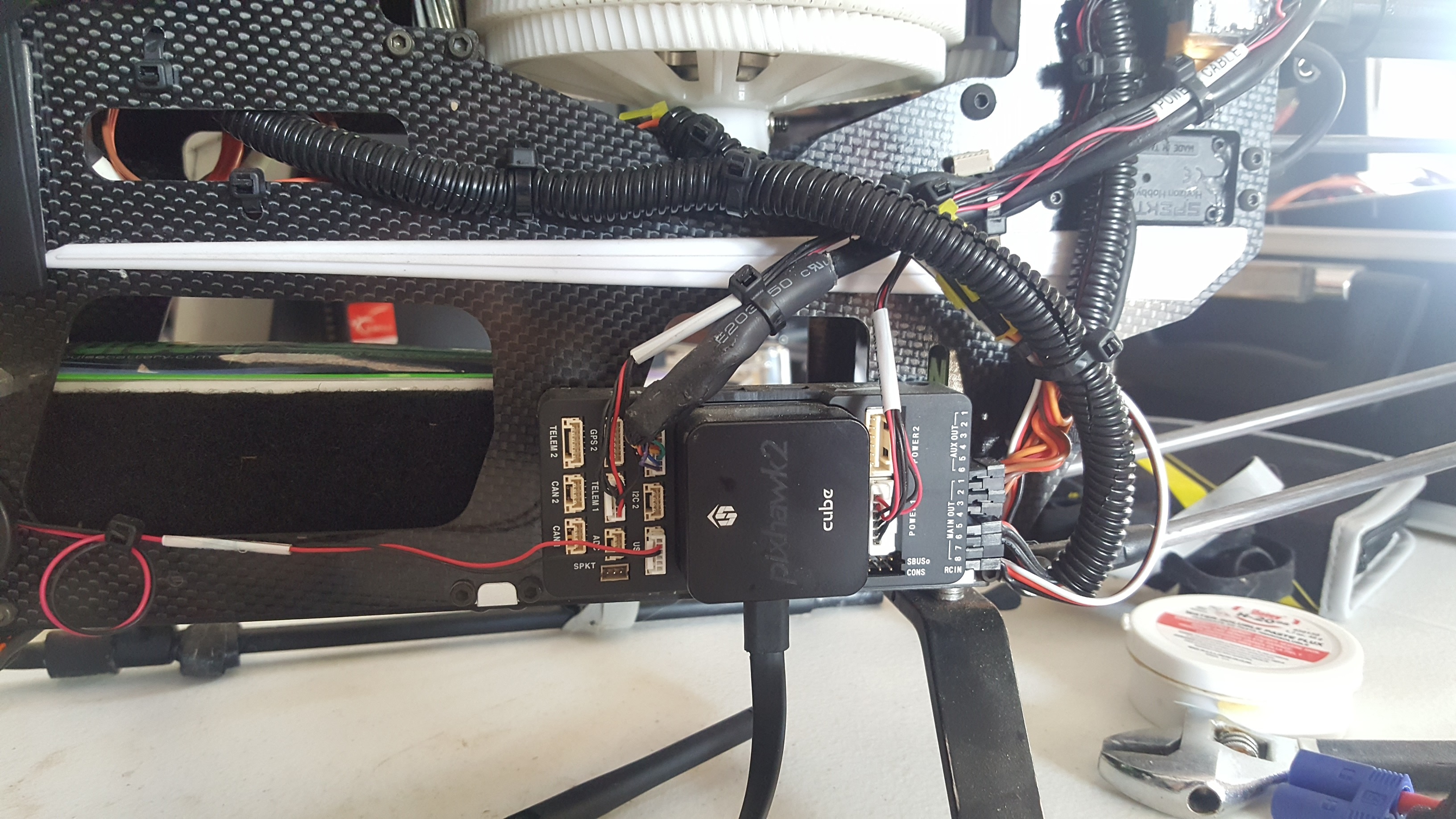
It was recently explained to me that the Pixhawk 2.1’s internal imu dampening is defeated if the unit is mounted on its side. Is this the case? I have a Pixhawk 2.1 mounted on an 800mm helicopter and it is on the frame side as depicted in the photograph.
@Proficnc
Thank you,
Tim
1 Like
I’m not sure if defeated is correct, but it was most definitely not designed to be mounted this way.
As such, there is no real data to say if it can or cannot function correctly this way.
Sorry for the vague answer, but I would prefer you made a right angle bracket to mount it correctly.
Phil
Phil,
So far from my still limited testing on the Pixhawk 2.1 with an 800mm Electric helicopter, the vibration profile is quite low. It is mounted only by the medium black foam blocks that shipped in the kit from the factory.
Since it is a helicopter space in the horizontal plane is at a premium so side mounting as i did is an easy choice.
Once the PIDS are a bit better tuned i can provide some logs of how it may, or may not be affecting vibration dampening. I can say so far there do not seem to be any adverse effects, but after more testing i can be more conclusive about that statement.
As long as there is nothing that can physically happen to the imu dampening or the unit in general am i to assume that although it was not intended to operate in this fashion, i am safe to do so provided i keep getting desirable behavior?
It it just that no testing was done in the manner regarding side mounting, or other orientations? I do have a location i could possibly mount that would be at a 45° angle to the mainshaft above the tail boom block, so closer to a horizontal mounting than i am at currently. But once again, if the data continues to be positive, is it worth moving it?
Thanks,
Tim
As with everything, testing and Data is king, if your testing is positive and you are confident in your decision based on Data, then I am good with that!
I appreciate the response! I am going through the process of testing and tuning while gathering as much data as I can. So far it is looking very good. I have no idea yet if the Pixhawk 2.1’s internal dampening is a main contributor to the vibration profile yet as I have not flown the same frame with the original Pixhawk but that is on the list for future testing.
What I will say for sure is that I am using the Pixhawk 2.1 on a large 800mm traditional heli with a torque tube tail vs direct drive and vibrations have been a non-issue. I was pleasantly surprised by this after reading about many builds requiring rubber ball vibration plates and many different types of mounting foam.
I have been working through tuning the helicopter for the different flight modes and soon will have data I will upload as hopefully a successful use case.
I appreciate all the hard work that is put into Pixhawk and feel lucky to have access to this great hardware for what I feel is a very affordable price! Thanks again!
Yes, re the mounting… unfortunately there has been a lot of advice given out based on bad theory rather than Data.
I find that a little strange, considering the hardware has all the sensors you need to get the data and make the decision 
Some frames will need additional isolation, but why add it if it’s not needed… especially on a trad Heli when you want good gyro coupling to the airframe…
Hi Timothy, how are you getting on with this? My next project is the same, A T-Rex 800 PH2.1 etc.
Not sure where to start with PIDs though.