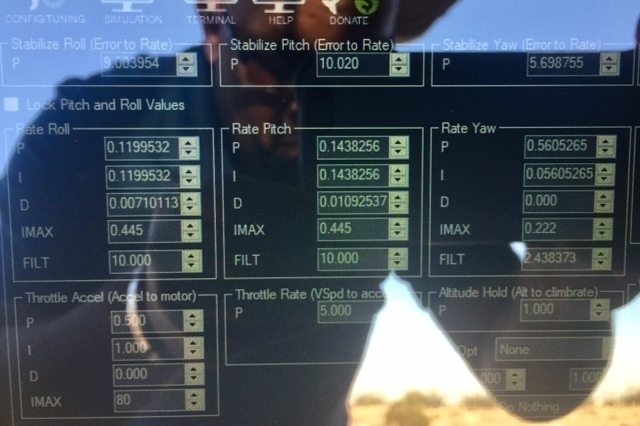
Update: Well today I’ve was able to successfully autotune my Aerobros T41 / Pixhawk 2.1. Following my last attempt which ended in a crash, I think I’ve finally resolve the stability issues I was having. After having to replace one of the motors and two esc’s I re-flashed the esc’s with the latest BLHeli firmware, I also enabled the “damp light” feature. Damped light at least in my eyes allowed for a much quicker response from the motors thus allowing for a more precise control. In addition to that I also increased the ATC_THR_MIX_MAX to 0.09 ass recommended by the Autotune instructions. After those changes I ended up with a very stable quad and the following PIDS:
However I do have one question; originally I was running BLHeli 13.2 because on that firmware version I could disabled the voltage cutoff. Since Im flying with Lithium Ion batteries I needed to be able to do that. On the latest BLHeli version however that option is no longer available. so Im not sure if the new firmware will still allow to discharge my battery down to 18.0 volts.