After auto tune when taking off in Stabilize the motors rev up quickly with vary little input and continuing on it seems to take off with only 3 motors and then correct itself and fly normal.
Only does this on first take off and follow on take offs it does not do this.
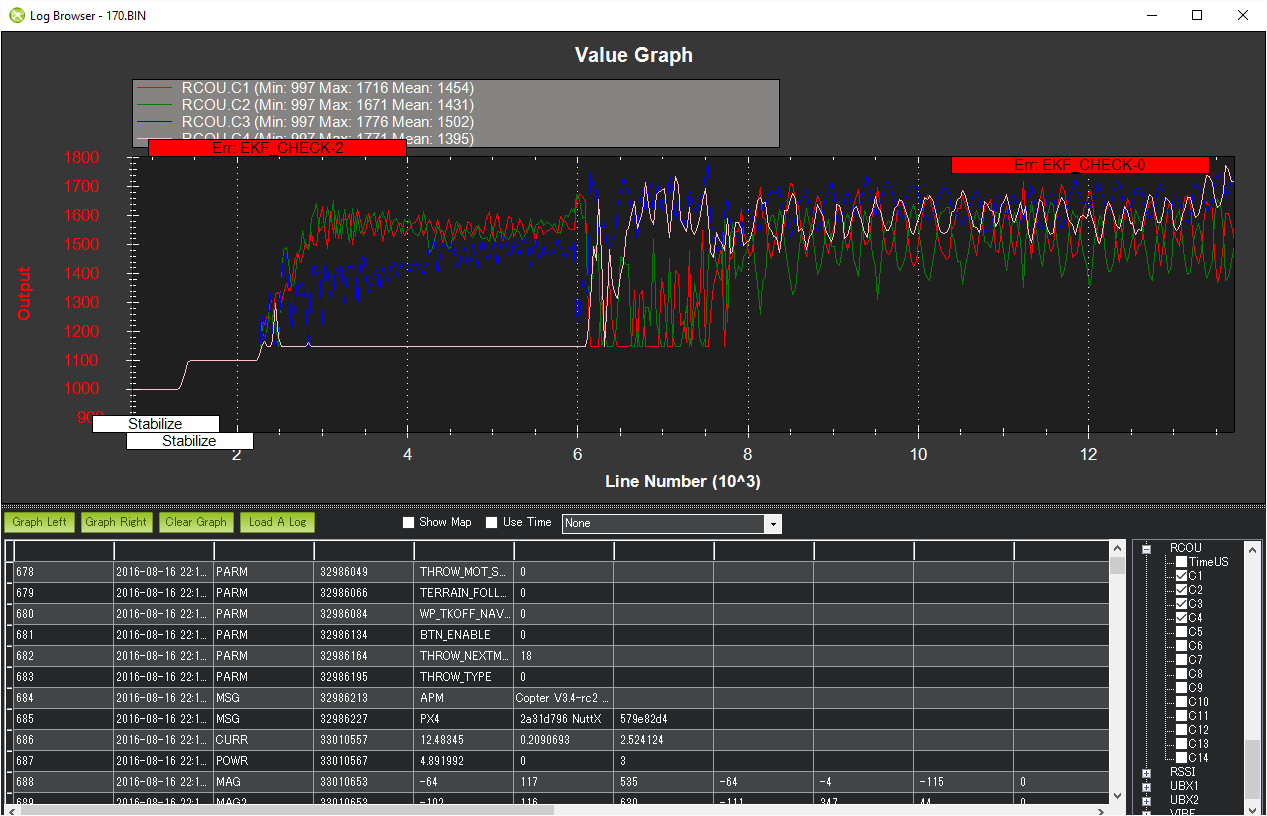
From the graph of the motor outputs it seems they are a little over active than before with a little oscillation in the motor outputs.
Copter seems to fly well though.
So the logs show what you’re saying quite clearly. So at the beginning 3 of 4 motors spin up, one stays low. Also during the flight the motors are oscillating constantly so I think the issue is just that the gains are too high.
I guess two possible solutions. The first may be just to reduce the gains by 25%. So here are your gains that I’ve multiplied by 0.75.
ATC_RAT_RLL_P 0.16166
ATC_RAT_RLL_I 0.16166
ATC_RAT_RLL_D 0.00711
ATC_RAT_PIT_P 0.13722
ATC_RAT_PIT_I 0.13722
ATC_RAT_PIT_D 0.00721
ATC_RAT_YAW_I 0.15
ATC_RAT_YAW_P 1.5
Another option is to reduce the AUTOTUNE_AGGR parameter from 0.1 to 0.075 and run the autotune again. I’d try the first option first though 'cuz it’ll be quicker.
Thing that scares me is that when I first arm the copter and give it a little throttle the motors suddenly jump to fast spin make it seem like it going to jump off the ground. I then continue to move the throttle up thinking its going to jump off the ground only to have no reaction at all. I then hit mid throttle and its still on the ground only now vibrating to get off the ground.
It does take off and fly fine but for a Stabilize flight it is a little unnerving.
My plan is to move this flight controller to a 250 size quad and retune. I will probably set them back to the default since I know what they were and it flew kind of sluggish so it will be less of a nail bitter.
This is a little larger than an IRIS copter and I can post the auto tune log if someone what’s to take a look at it.
I input the new values for the PIDs and got the same results. First take off is over reactive and sloppy but flies just fine. Motor outputs look to oscillate as before. The second and third take off where smooth and just right. I think the EKF is taking too long to settle down before the first take off.
I also think this is an issue with the Pixracer and I need to try this on the Pixhawk and see if I get the same results.
Here is the log of the flight with the two follow on take offs that worked just fine.
I performed an Auto tune with my Pixhawk flight controller on a similar size copter with slower motors and the same thing happens. So it’s not just the Pixracer that flies like this.
I did notice that the slower motors makes the issue less noticeable but still happens.
I think if this was an over power 250 quad that the copter would just flip over on its back if the motors were started. Have not tried this yet…
Auto tune seems to work well and completed quicker than on the Pixracer maybe because it was closer to being tuned already. I don’t think auto tune is the issue here.
Here is the auto tune log and you can see at the take off each flight before and after the auto tune that 3 motors spin up faster than the 4th motor on take off. Copter flies just fine and is very responsive.
Just did a test takeoff in different modes to see if I can determine what’s going on here. Takeoff in Stabilize and the copter wants to lean over. Takeoff in Position Hold or Altitude Hold work just fine.
Also the ATC_RAT_YAW_P and I are still quite high at 1.5 and 0.15 respectively (I know I gave you these numbers before) so I think maybe reducing them again to 0.5 and 0.05 to see if it helps.
By the way, have you ever tried Copter-3.3.3 on these vehicles? If “yes” I guess they didn’t have the same issue?
One more small thing that is probably not related is that there is a fair bit of noise on the primary compass (which should be the external one if you’re using that). I’m not sure where the noise is coming so can’t say whether it’s some wiring issue or something else on the copter is interfering.
Also it looks like you’ve used the mission planner based compass calibration. Could you try with the onboard compass calibration (bottom right on the MP’s compass calibration screen). There’s a COMPASS_CAL_FIT number that you might need to raise from it’s current “8” to perhaps “15” or “20” if the calibration fails.
I have notice that if the copter is pointing in different directions a different motor fails to spin up. Don’t know if this is because of the compass or because the copter is now leaning in a new direction. I did try and pick a spot that was level.
I did use copter 3.3.3 and did not see this issue.
If you look at the log the copter was pointing in different direction on each takeoff with different motors failing to startup.