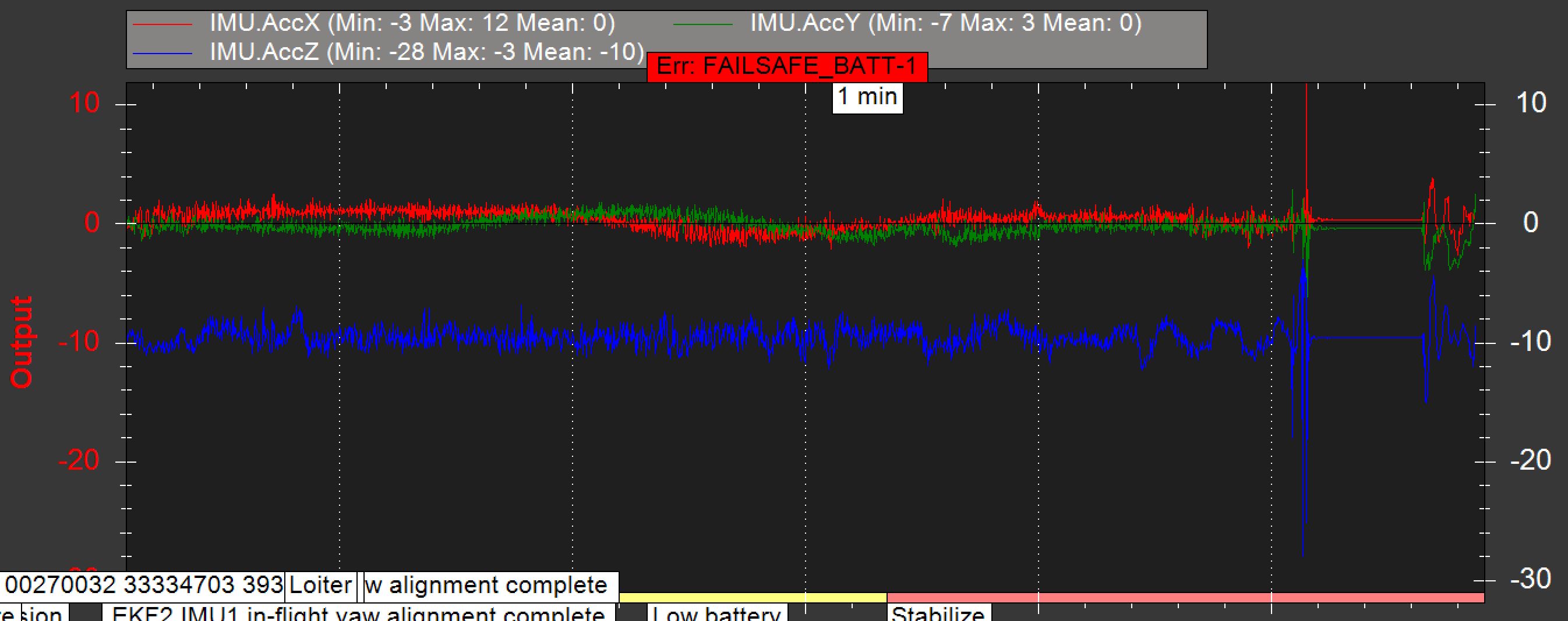
Use Vibe X/Y/Z for analysis, it’s more useful. Just select the “Vibration 3.3” on the log data pull down menu. You will also get a better response if you post the log rather than a screenshot but up to you.
Looks okay, but the IMU logs don’t tell the whole story; there’s a set of log fields called VIBE.Vibe and VIBE.Clip, take a look at those. Mission planner has a preset graph called “Vibrations 3.3” that will graph them all for you.
The rules of thumb are that the VIBE.Vibe fields should stay less than 30, and the VIBE.Clip fields should not increase while in flight.
Your vibrations could use some work:
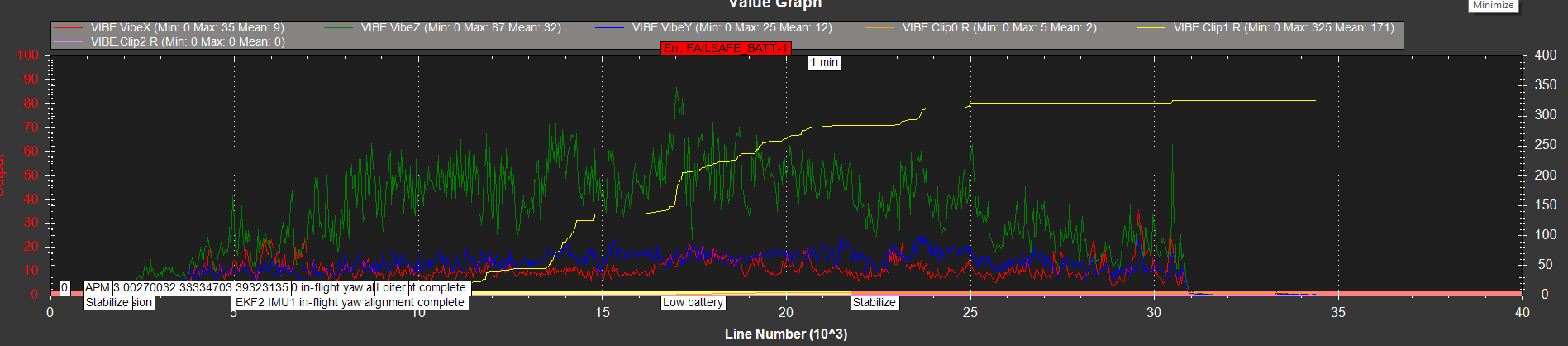
Your Z vibrations are high; the rule of thumb is to try and keep it below 30.
You’re also getting clipping in flight, which means the accelerometer is getting banged around (>16 G’s).
Have you got something rattling against the FC?
Wires flapping in the breeze?
Z axis is not that happy.
As @Anubis pointed out your Z axis especially could do with some work.
this is a video I shot. https://www.youtube.com/watch?v=7QMfDPenTbM.
I have DJI 450 The controller is setting on the top plate with 4 squares of the kysho zel tape that are about 1/4 inch square.
Pictures of your drone and the flight controller mount would allow us to critique your setup.
I don’t have any experience with Kyosho or Moon Gel, so I’m afraid I can’t offer any advice there. But I know flight controller mounts such as this one are popular and usually quite effective. There are many variants and are easy to find on Amazon, Ebay, etc. for cheap.
Zeal usually works.Sometimes it needs a bit of weight added to the FC to damp out the Z axis a bit.A small lead weight from a wheel balance set is used sometimes.Just something to add mass to damp movement a touch.
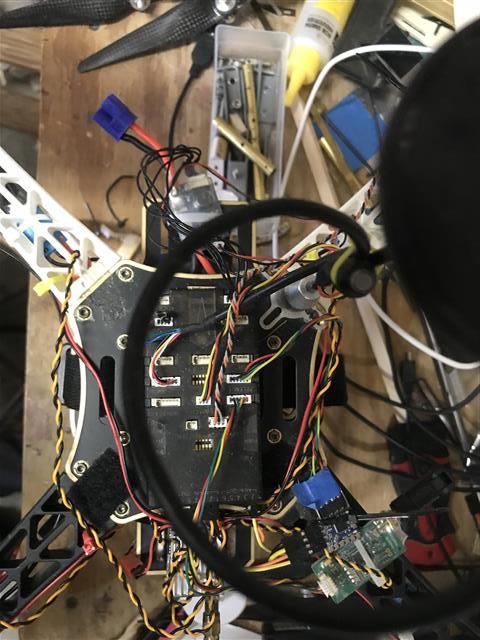
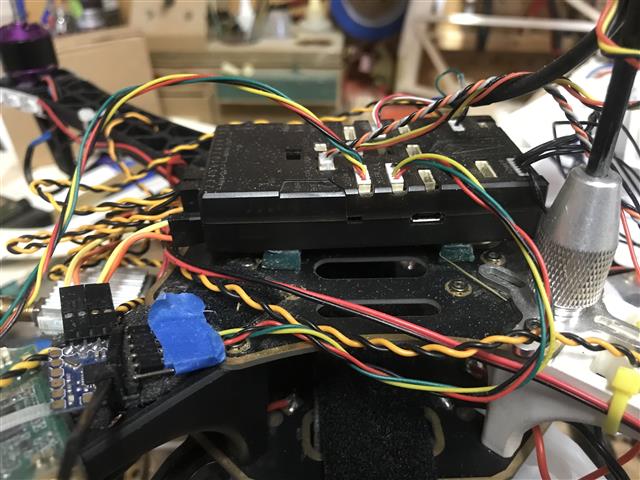
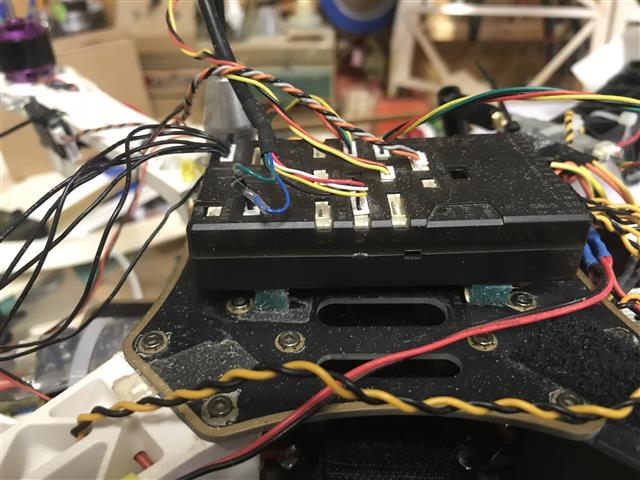
I posted some photos. Any suggestions?
From the photos it doesn’t look bad at all. As Mike suggested, it might be worth checking that none of the wires are flapping around in the prop wash and knocking against the Pixhawk.
Unfortunately, however, damping vibrations is a science that we usually take an unscientific approach to, so occasionally we end up with a configuration that doesn’t work because of some harmonics or mismatched damper stiffness/weight. This means it can be worth just trying different dampers that are stiffer or softer.
Jagger suggested something that is worth trying: see if taping a bit of weight to the Pixhawk makes a difference in vibrations. The Pixhawk is pretty light, so sometimes this means that putting it on dampers can result in a Jello effect that makes vibrations worse instead of better and adding a bit of inertia can make a big difference. If that works, you will know that you need to use different dampers or mounting method (or just keep the weight).
I’ll second the suggestion to add some weight. I had bad vibrations with my Pixfalcon that I couldn’t sort out till I tried mounting some lead weights.
It looks stupid but it dropped my vibes by a factor of 10 and the overall weight is negligable. I’d suggest trying different weight amounts to find the sweet spot.
You are using a frame that does not have good characteristics, as I have experienced it myself (some frames absorb better vibrations, i also notice that Pixhawk/Arducopter does not seem to like "softer, more flexible frames). So my recommendation would be to use a more sturdy/rigid frame mixing aluminium and carbon fiber (avoid plastic parts in arms or plates).
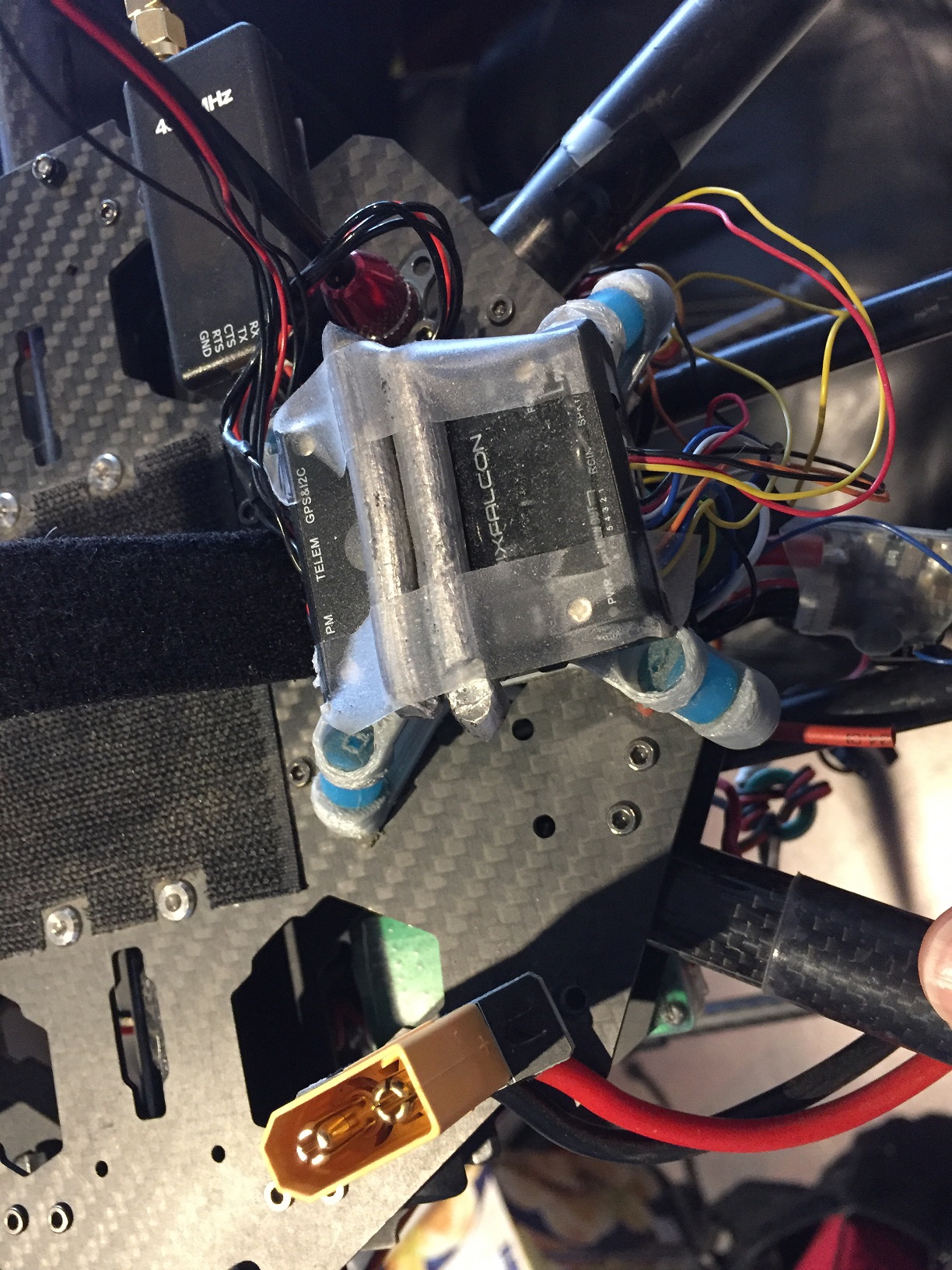
This is a solution I have used in even the most demanding and vibration prone frames with great success.
Suspended on silicone “O” rings, a layer of Eurathane, 1mm lead sheet, Futaba gyro tape, then FC on top.
Direct IMU measurements are reduced from excessive to below 1.

What frame would you guys recommend.