How accurate should a Pixhawk be at holding altitude in Altitude hold mode.
Took my new quad out for a spin yesterday and found it did not hold altitude, but I might be expecting too much for a basic Pixhawk with no ad on sensors.
I entered Alt hold at about 20 foot but it quickly ended up at around 60 foot.
Is that to be expected or an indication my Pixhawk has issues.
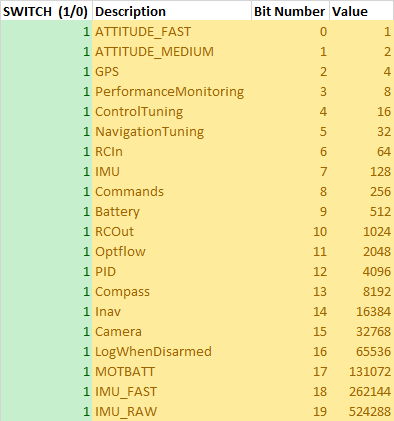
well, that bitmask is every option enabled, which you will don’t need and can bog the CPU down. Currently there are twenty options in the log file
As you can see, each option is given a value. You add up the values selected to find out what the log_bitmask value is. In your case, EVERY option would be enabled to get that result. IMO that’s far too much logging going on.
I don’t have optflow, but my bitmask setting is 10230. That enables the following: ATTITUDE_MEDIUM, GPS, ControlTuning, NavigationTuning, RCIn, IMU, Commands, Current, RCOut and Compass.
My opinion, the most important things to log are RCIn and RCOut as well as IMU.
Note: The Wiki entry for the logs at http://ardupilot.org/copter/docs/parameters.html#log-bitmask-log-bitmask don’t list Bit 16 (Log When Disarmed) which is an important one for me since I do a lot of bench work with mine and don’t necessarily need logs while the copter isn’t armed. But it does work from what I can tell. At least it still works on 3.3.3.
Bizarrely I have been checking all the earlier log files on the SD card and found that they are all readable except the three from when I was actually flying, all the ones built whilst testing on the workbench are fine.
Just to test I have formatted the memory card and will start again this weekend. Tests done on the bench show new logs are readable so perhaps it was just a card corruption issue.
Mine is set at 176126 from when I loaded 3.3.3. I’ve never done the math to see exactly what I’m logging but everything I have ever needed to view has been logged. Not a very educated answer but all is working well.
ATTITUDE_FAST: OFF
ATTITUDE_MEDIUM: ON
GPS: ON
PerformanceMonitoring: ON
ControlTuning: ON
NavigationTuning: ON
RC In: ON
IMU: ON
Commands: ON
Current: ON
RC Out: ON
Optflow: ON
PID: OFF
Compass: ON
INAV: OFF
Camera: ON
LogWhenDisarmed: OFF
MOTBATT: ON
IMU_FAST: OFF
IMU_RAW: OFF
From what I understand, some new logging parameters have been added since 3.2.1. They always get added to the end of the bit list is my understanding. I’m not sure that 3.2.1 has the last three (MOTBATT, IMU_FAST,IMU_RAW).