This video show the hex lost 3 propeller. you can see from 1:05 . The Flight control is N3 from DJI.
By your video and my crash all I can expect is a challenging test - Pretty nervous about that.
Randy, what your thoughts about testing motor failure in an automatic altitude mode like loiter? I would like to avoid the test using stabilize, it would make things easier. What about raising throttle_imax?
Thanks - will take a look
if you have not enough power, your hex will lost alt control. so ready for that.
I can turn off all motors in stabilize, let it go down in free fall for about a second and recover control as soon as I raise throttle. So I believe it is OK to try and if something bad happens, reestablish the power to the failed motor.
I will not have much time for that. That’s why I would like to test in loiter mode to focus mainly on the fail-power knob.
In my case roll/pitch were stabilized, I had troubles with yaw and altitude.
This should be priority. Find the bottleneck. If 4 motors are not able recover flight I would expect that at least one will run at 100%. Other 3 will maintain attitude according priority.
1 Like
I’m wondering if its worth it to try to tune to archive that before a dev give his word about it. Maybe this scenario is something that the current code could digest naturally and control the copter, maybe it could be something that requires additional code on the motor mixes/ control routines.
It would be great if Leonard could give his word about it !
Hello,
My experience with an Hexa. Same frame but with differents motors.
First motor failure flying loiter, maintain altitude but cannot maintain heading, second motor fail, everything down… Underpowered hexa, il you want to maintain control, do not try to maintain altitude.
Second motor failure, same frame with larger motors and propellers, a bit over powered. Motor failure (bad esc solder) while flying auto mission, just a slight yaw action during motor failure, continuation of flight until it is above me and I detect the defect. Manual landing, no further problem. (Navio2 with Arducopter 3.4.x)
Another one with my Octo (Quadx8). Power is balanced, and I maintain altitude at around 55% power.
Can maintain control with one motor out then manually land. (VRBrain5.2 with Arducopter 3.3.3).
Marc
Mlebret,
Would you mind to share the log of this flight with me ?
I will have to look in the computer, ![]()
Not available, I had some problem with Mission Planner and the log is no more present (if ever downloaded?)
Sorry,
Marc
Went out to test the new parameters, Randy’s patch etc. and all went fine! The copter was able to maintain its altitude and lost a little bit of yaw. I was all the time in loiter and have not touched the sticks all the time. My main goal today was to test the test environment. I was equipped with gimbal etc. and there were no wind at all, so I was afraid of vortex ring ( lots of power and no wind ) to bring the copter down;
I’m uploading the video to youtube and will post in a few minutes the log along with the video.
I would ask the community to review the log and give your toughts if I can go ahead and test RTL etc.
While I was in the field testing, I was wondering that AC could detect the motor failure and implement a few safety measures, like reducing roll/pitch angle and engaging simple or supersimple mode automatically. That would be awesome.
Thanks @rmackay9 for your patch and everyone that helped with insights and sharing their experiences: @Ivosch , @pat_ballard, @fpvberlin , @wyq200704, @cookmangr and @Andre-K ( sorry if I forget somebody )
By the way, the patched firmware worked like a charm! Now I believe it is safe to test if anyone is confident with the procedyre.
Here is the video
And here is the log: 2016-12-28 19-27-54.bin (2.4 MB)
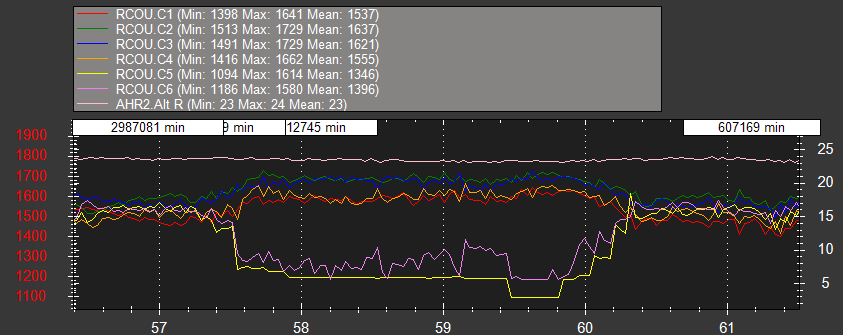
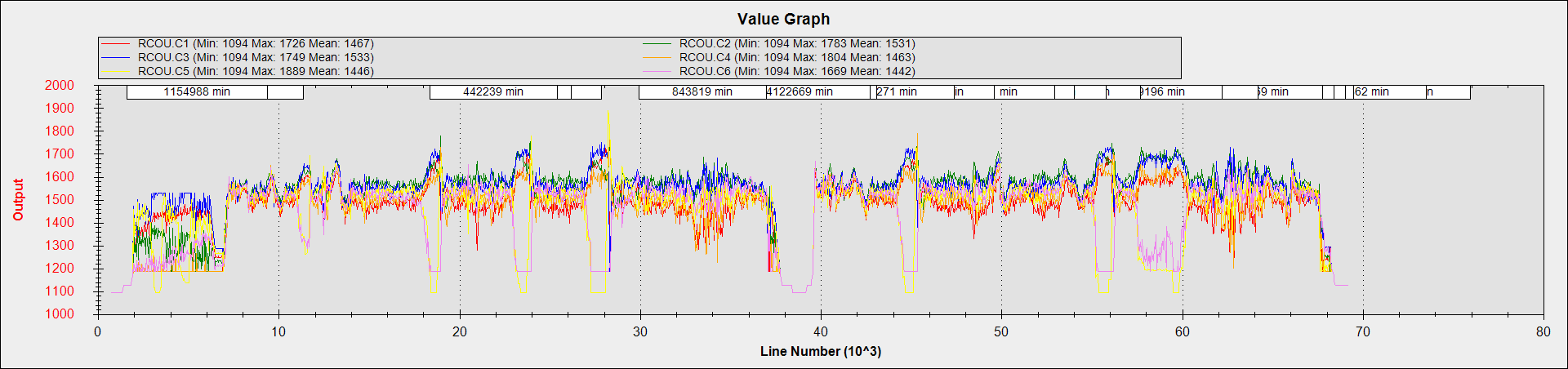
Plotted area of test. Please note that CH5 is logged as it is really outputted, so ch5 and ch6 went down together. All other motors seemed to have increased a little bit more than in the real crash. Note the altitude which haven’t changed during all the test. GREAT!
Great! congratulations!looking forward to your further test.
I have view your log and find you use ch6 knob to adjust the output of motor 5 slowly. But in reality,maybe the motor fails suddenly. So maybe should use other toggle switch to simulate. It is more dangerous to do that.
i am confused by the para MOT_YAW_HEADROOM, can you tell me what the para mean?
Are these parameters used in your test above? Thanks.
Yes, defaults resulted in a crash
The changed parameteres were:
Yaw-Imax to ,0111
Roll/pitch imax to 0.8888
and yaw_headroom to 100
Yes, I mean to do it slowly as I’m not willing to risk anything. I also didn’t let it failed for more than 1.5sec. Since it was the first time i ran the code, the lack of wind, getting used to the behavior and fw not tested, I was very conservative. I didn’t knew also how Arducoter would react when the power were restored. Today I took a deep overview at the log and it was noticeable how easily normal flight conditions were restored when the power was restored. So, now I know that if it starts to fall, I’m confident that it will recover pretty fast from the condition - unless it triggers something that I haven’t think of.
By the code ( i might be wrong ) it seems that it reserves some power ( pwm range ) to have enough room to control yaw. But this might prevent the motors from increasing their power to avoid a descent. So, you assume that you will loose yaw control in order to keep flying. The next step is to realise if RTL will be capable of controlling the drone in this condition to bring it back home.
I’m planning to try this in the beginning of the new year.
If you try rtl ,change the behaviour to not change the yaw
Don’t know if that is possible. That lead me to the crash, Randy explained the issue above. I believe the autopilot is able to bring it home while spinning. I’ve tried this myself with simple mode and it works.
Maybe i can test the code with DJI 550 that is a smaller hex,with 2212 motor and 10" prop. It maybe less dangerous. I can test with stabilize mode and loiter mode.