After updating to the 3.7 firmware we are seeing an abrupt nose up condition after the ARSPD_FBW_MIN is reached during the Q_TRANSITION_MS. Were were able to lessen the problem by reducing the Q_TRANSITION_MS from 5000 to 1000. We think that setting the Q_TRANSITION_MS to zero might eliminate the pitch up issue all together however things were working perfectly before updating to the 3.7 firmware.
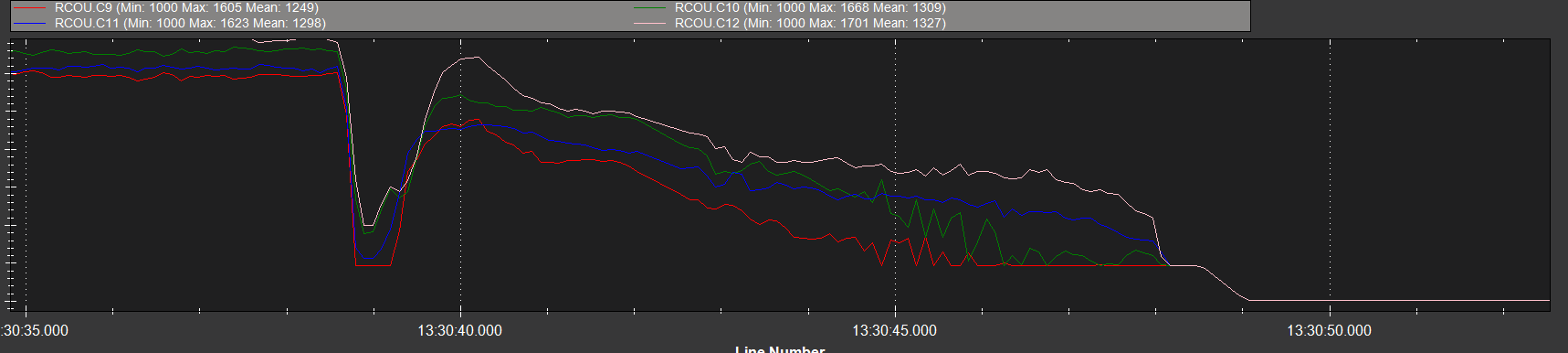
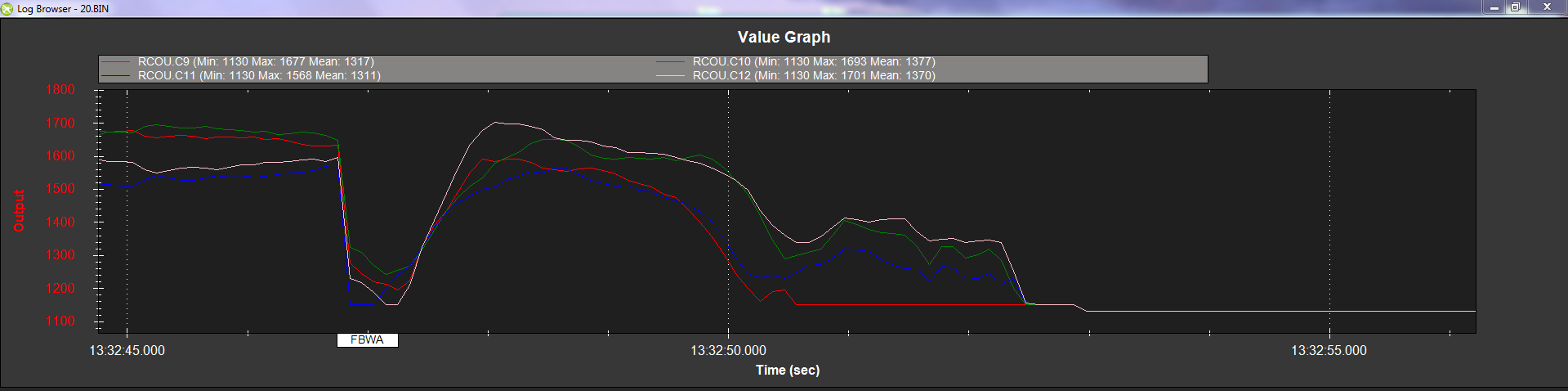
Here are 2 screen shots from the quad motor RC outs. The first from the previous firmware and the second from the new firmware.
I believe I was running 3.7 also… This happened in October if I remember correctly which was around the time 3.7 came out… I could be wrong, but I think this is true…
This really makes me worry as I have a brand new one ready to go. I just need to gain tune in hover and she is ready for a transition… Luckily my newest model is a lot lighter than the previous version. Fixed wing tuning is completed.
Consider performing your initial test using v3.6.0 firmware. This may provide more evidence if the issue is firmware related. I have had good success using v3.6.0 with the exception of RTL mode. Replacing RTL or Hybrid RTL modes with VTOL_LAND works well.