As one of the members pointed me,it is not clear what my questions are…i manage to solve almost all but there is few left so i will try to summarize…
-
What about very fast disarm/arm msg i heard from mission planner in 2 out of 15 flights,while craft was in the air?!Maybe it was more bcs. voice was not on all the time…
-
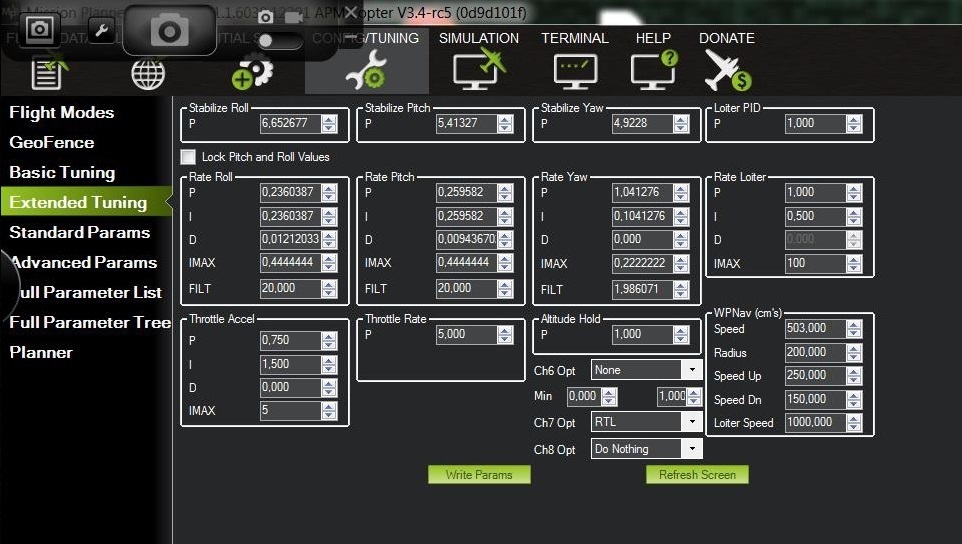
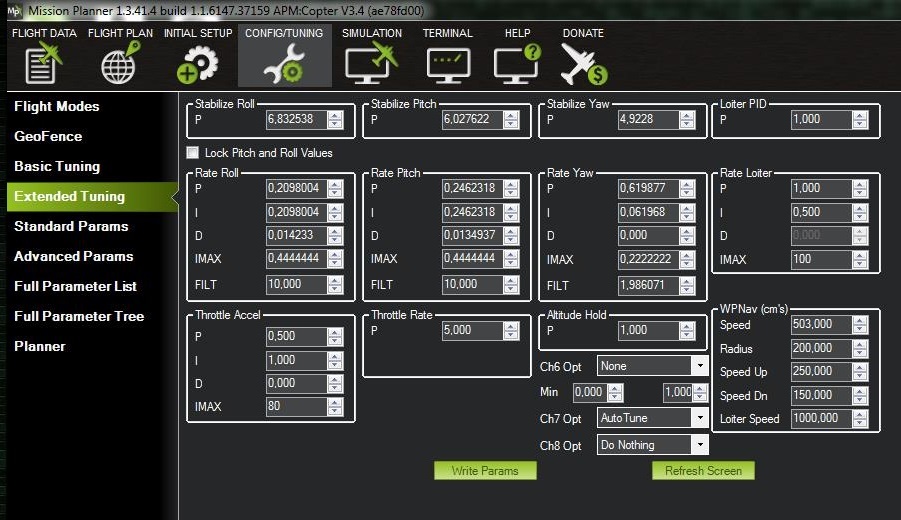
Why are the values I got from AT 10x times (1000%) bigger than usual(also with first AT was 2x(100%) bigger)??
Also during Roll AT it seems to me Y6 leaned for test to one side more than another… -
If i use double LiPo, 4 instead 2 (40Ah vs 20AH) as dummy weight and also connected,could this significantly effect results of AT?I will fly with 20Ah and gimbal instead extra LiPo
-
What about ESC calibration?
Two of them calibrated minimum 1028 instead 1024 like all others(max is 2020 on all) …
Should i set all to same min value?
In Mission planer min-max is set to 1000-2000)
PPM centre throttle(in ESC BLHeli settings software) is at 1500 when actually mathematically middle is at around 1525…default BLHeli settings is 1488…but i don’t use central throttle,is this important at all?
PLEASE TAKE A LOOK AT BLHELI SETTINGS IN ABOVE POST… -
Why my Throttle Accel IMAX is 5 where should be 80 or some 2 figure number?
-
Could some of this problems be connected with my Windows 10 tablet,don’t know how,everything is working well,but who knows?
What about Pixhawk memory card,how big or fast it should be?class 10 4 GB ok?many things are enabled in logs?..my Pix is original and old,ROM is only 1GB…i remember something like that and logs… -
What could change between 2 flights;one was Autotune of 17+ minutes motors were just slightly warm(almost body temperature) and in my next flight 5 minutes long they were double that?
-
How can i start Autotune from the values i already have?
Is it parameter AUTOTUNE_MIN_D or there is something else? -
What about changing in altitude values from baro if copter just rest on the ground for some time?
8 meters in 30+min in my case,copter had some 8 GPS thru window and HDOP around 1
also i noticed that before when i left it in the field not flying…
also showing negative altitude values after landing in alt hold as well… -
Why Mission Planer AutoAnalysis showing problems it does not exists?VCC Warn…
Also some other values are NA (i guess Not Available)…autotune,balance/twist,PM,Pitch/Roll,Thrust
Can we make this tool somehow better,graphical maybe similar to Forest excel sheet? -
What about GPS/compass,accel signal from AP to gimbal thru mavlink to avoid horizont drift in extreme situations?
-
Where is Leonard Thall one of the authors of Autotune,man who knows it like his pocket?
-
Who will be responsible for answering questions about Pixhawk 2 problems and where that will be?