That is very cool. Please keep us updated - love the pictures. Interesting that the graph sort of has a gap at 2.4knots below the line - I’d guess the motor’s are their most inefficient at that point but ok either side.
Thanks, Grant.
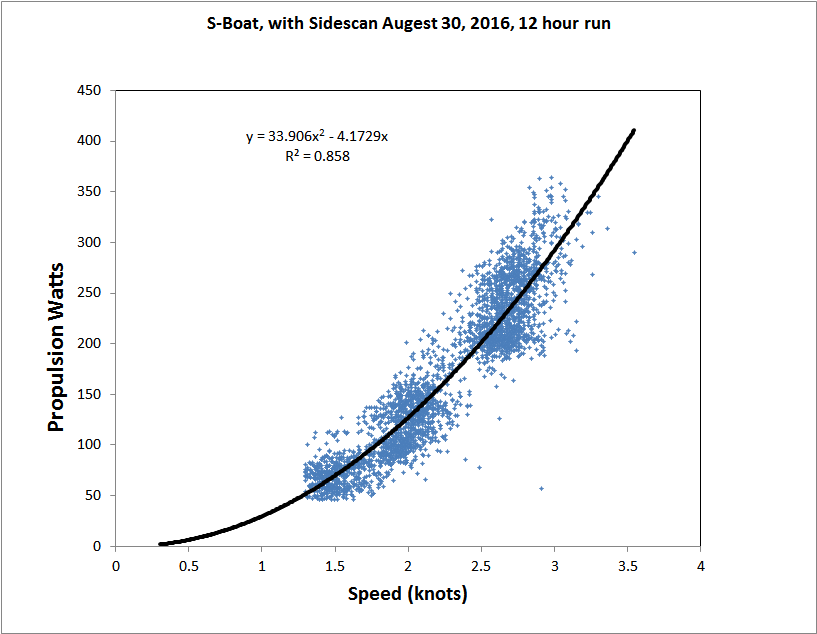
I set the speed of the boat to 3 different speeds… it ran each speed for hours… so that’s why there are 3 groups of data
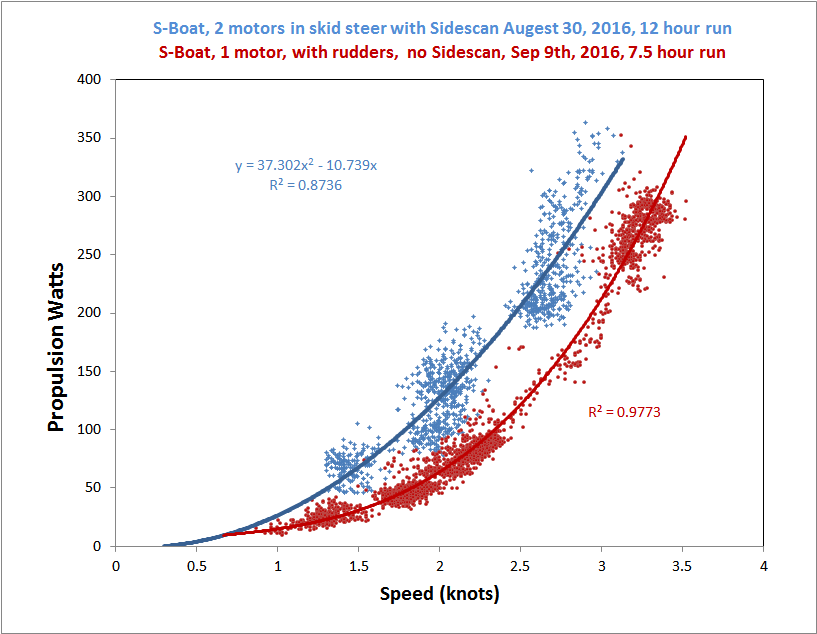
New data… I added rudders to the back of the boat replacing the skid steer and moved one motor to the middle
of the boat… The boat now only has one 55 lbs thrust 12 volt trolling motor (red line)
I found skid steer very difficult to tune…
All amp measurements and voltages were collected with a 24-bit shield
on top of an Uno saving the data every 4 seconds.
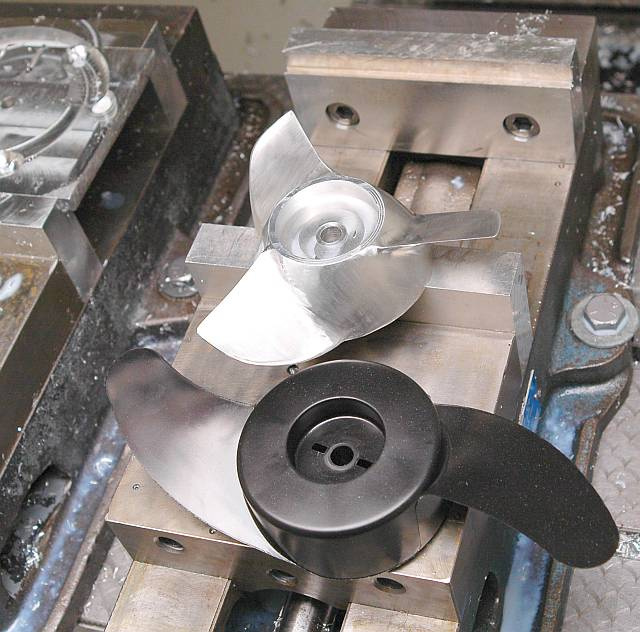
Next step to change the prop and get even better efficiency
I made this prop many years ago… It tested well back then…
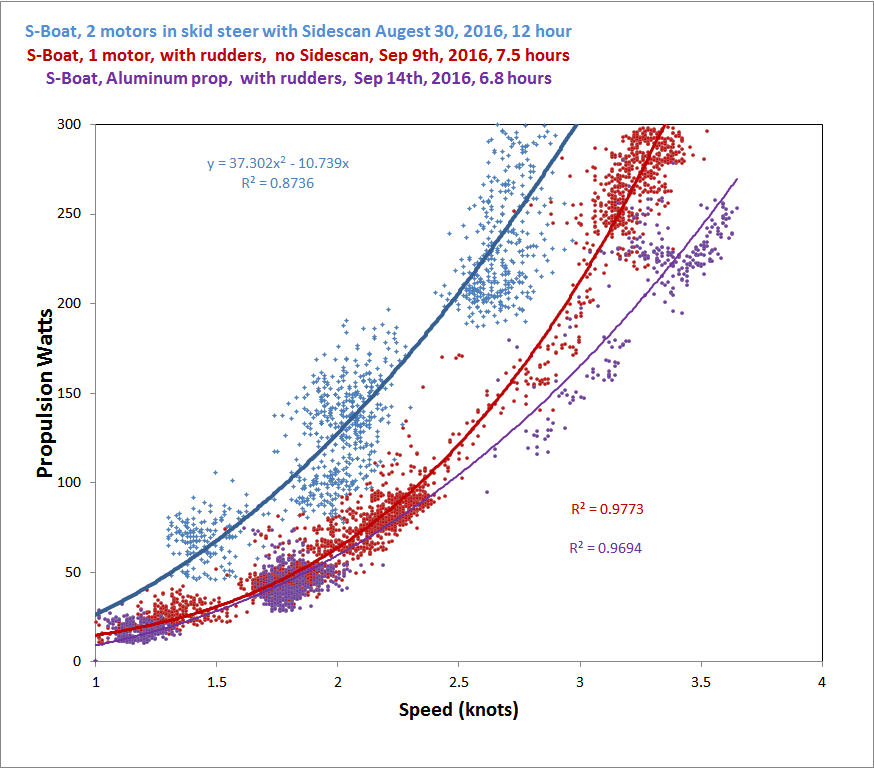
Today I used this aluminum prop and increased efficiency again
update… I put the boat in the water this morning and its been running at 3.8 mph (311 watts) all day.
At 6:00 pm slowed it down to 2.5 mph (117 watts) and watching it all night… Its now 12:30am… going to be a long night
I am now at my house 5 miles away, watching Mission Planner live from my couch. cell phone data rate is ~450 mb/day
btw… purple curve above predicted ~8 amps at 2.5 mph… real time measurements show 7.1 amps…
Eddie
Made it through the night no problems… At 10:00 am it was charging 30 amps… at 11:30 is was charging
40 amps… increased speed to 3.6 mph… I guess I will leave it out there till it breaks… LOL
Eddie
update… still running ~36 hours total… total distance is about 100 miles…
I received a 25 foot HDMI cable… Sent mission planner to the big TV at up to 4k…
I reset the connection every 100000 feet traveled… Its hard to play log files that are over 50mb…
I spent a LOT of time getting the boat to travel strait… There is no one setting to do this… My experience
is Steer 2 servo P, and Period need to move together at the same ratio to get really strait lines.

This is really cool - nice work!
Looking very good. Let us know how far you get!
Thanks, Grant.
Boat is back at the house after a 53 hour, non stop test. 150 miles. Could not have gone better.
Bright sunny days made for high speeds (4 mph). On the last day a thunder storm moved in
which was perfect for filming. Now I can get some sleep.
Eddie
53 hours non stop is awesome. That is a great run. Do you happen to know how big the dataflash file on the SD card got or how many logs were generated over that time?
Thanks, Grant.
I did not even look at the data flash on the Pixhawk… I had %100 telemetry being sent back to the house (5 miles away)
the whole time. Every 100000 feet I would restart that file. The total size of these files is ~500 mb of .tlog files
I converted all those to .csv files and wrote a program to get a few things out…
The total size of the csv tlog files is over 2 gig
Also I had my own data logger on board keeping track of volts and amps of everything every 4 sec.
This was one file, not very large.
Eddie Weeks
Eddie, would you mind sharing how you did your comms setup? I believe you mentioned you were using cellular in your post on 20 September.
its very simple… I have a guy. He install a raspberry pi with mav-proxy and a usb 3g dongle.
He would type in his house IP number. His house would record everything and relay the data to my house.
I could drive the boat with my joy stick on my pc no problem… that’s all I can tell you
Eddie
“I have a guy” Ha! no worries, just trying to research ways to get longer telemetry for the ArduBoats for my next project. It would be nice to get a RockBLOCK for sat comms on there one day.
Hi Kevin, you can do telemetry and video over 3g/4g. The easiest way is to ask your service provider for a public IP but in many countries they’re not took keen to give out public IP’s. If that is the case in your area you will need a companion computer and set up a tcp tunnel and then send upd packets down the tunnel. Basically the companion computer calls the ground station to set up the TCP tunnel and then the ground station can communicate and receive the telem and video packets.
The cool thing is you can under/over lay the video data to you HUD so you can see the true horizon.
I am looking at the RockBlock myself but I am not sure if it has the band width?
@Lat_Long thanks for the explanation, I still haven’t wrapped my head completely around how to set-up a companion computer (there’s instruction on ArduPilot and then GitHub repository…which isn’t mentioned).
A few weeks ago I ran across UAVCast, but it doesn’t look like a full “internet of things” solution because you need another dongle on the GCS end with the IP address.
Yeah, the RockBLOCK isn’t going to have much bandwidth and will cost a bit to use, but looks to be the only solution out there to send serial comms over satellite. in the very least, it should have enough to do telemetry and set new waypoints. A lot of R&D is going to have to go into making that useable.
I’ve been using cellular telemetry on my prototype. I’m using a Windows 10 SOC (have used RPI as well) with MavProxy which forwards to an amazon server also running MavProxy. From there, you can connect from any computer. It’s actually easy to setup - after trying to find “a guy” for some time and not getting anywhere (at least with the windows system), I finally got frustrated and jumped in… then realized no programming is required!
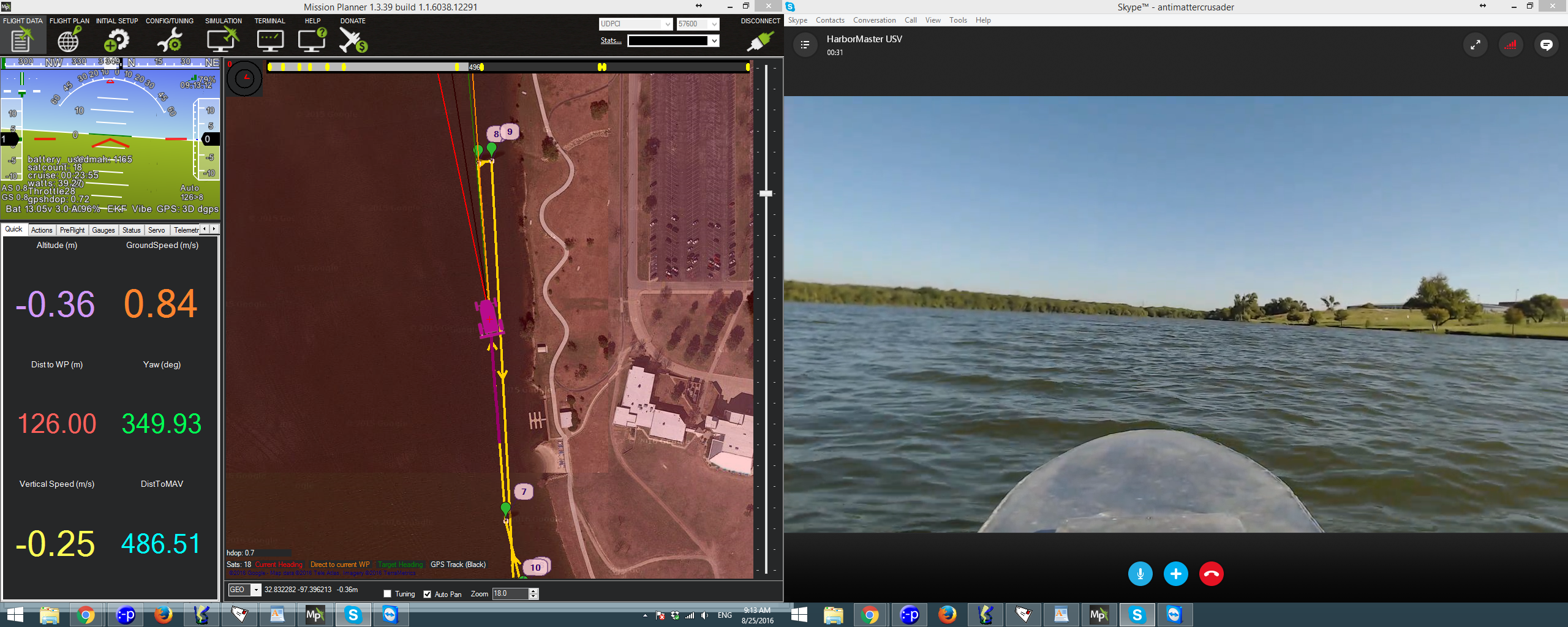
Anyway, running a Windows system instead of RPI allows for you to put Skype on your boat and have a live HD video feed when you call it (and setup for auto-answer). You can also add Teamviewer to remote admin, or even put Mission Planner right on the boat, skip all the forwarding and such. Nerd-Redneck solution, I know, but it works and works very well. GIT R DUN… errr… warp speed… or… uhhh… nevermind. 
Let me know if you need any help!