Installing GPS wires.
First I drill two holes

Them pass through the hole the wires (don´t try at home if you aren´t in winter, at the farm in a rainy day  )
)
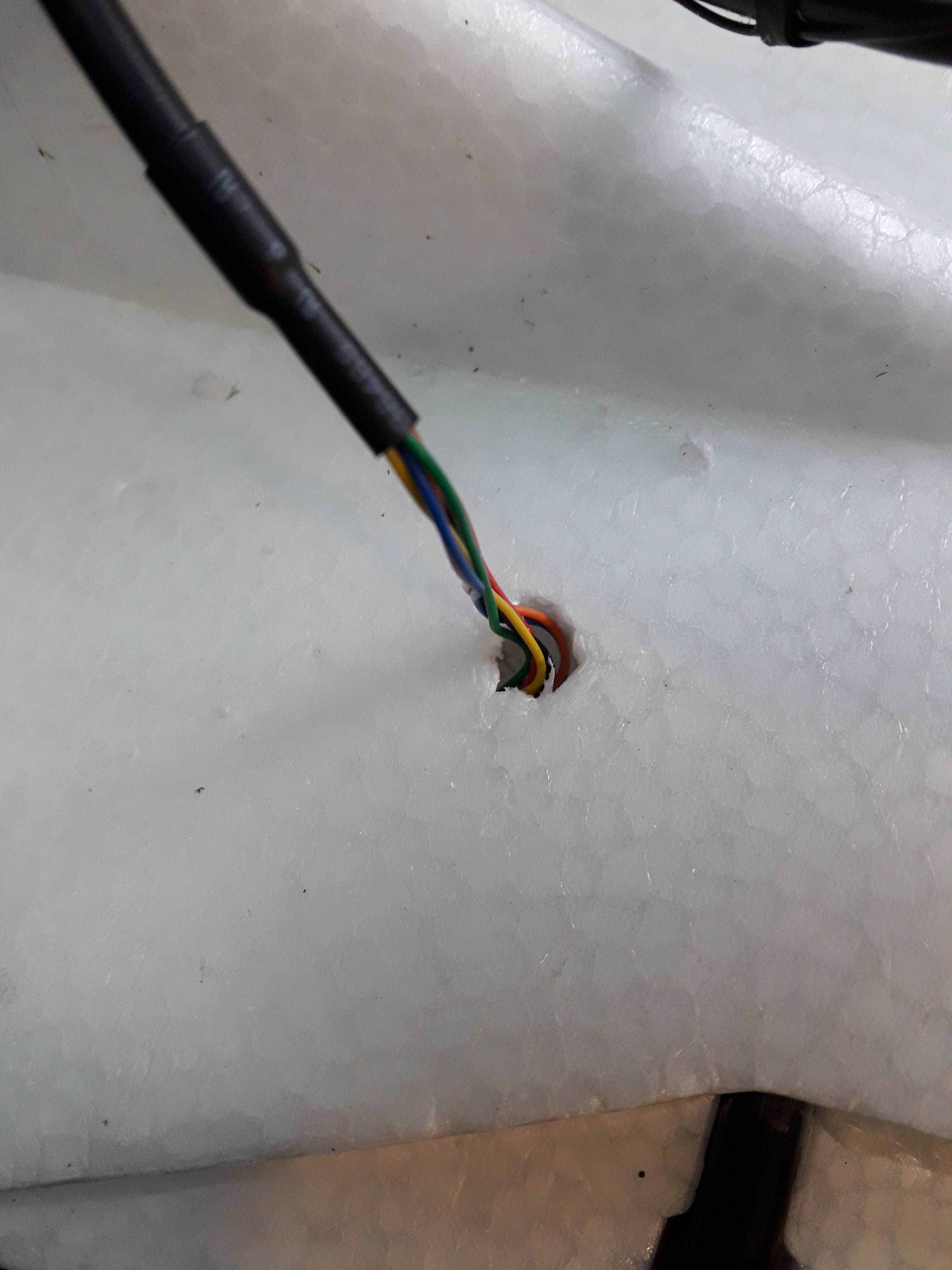
and put a plastic to protect around the hole
Installing GPS wires.
First I drill two holes
Them pass through the hole the wires (don´t try at home if you aren´t in winter, at the farm in a rainy day )
and put a plastic to protect around the hole
Install landing legs:
I wasn´t shure what side to choose and, finally I installed in two directions to test them, parallel to fuse looks little unstable from side to side.
they are cheap chinesse multicopter legs fixed with plastic ties so, if It has a forced landing, they suppose to broke and doesn´t broke something more expensive (better if it doesn´t test this theory  )
)
I strongly suggest you get rid of those prop adapters and get the kind that are screwed onto the motors.
Nice work.
Thank´s Iskess for take a look and so important observation, these are old motors that I have in list to change but you remember me not to sleep with this thing and pay special attention to new motors prop adapters.
I like your suggestion and motor choice Sunnysky X2216-7 1400KV so I bought them and now waiting to arrive next week, I have to wait more time for ´9 props to arrive; It´s looks a big risk (lot of work) try to lift up 3kg with this old motors with horrible prop adapter and one with an strange sound, I dissasemble it but I couldn´t discover the issue, bearings looks good but, perhaps they aren´t . I have a good experience with Sunnysky customer service, they agree to send me two motors with CCW prop thread and two with CW thread, they are airplane motors.
I´m going to dead of anxious with this proyect but one side this hobby 
Thank´s iskees
Finally I recived the props but weather didn´t help until now, first test I had the yaw issue like others, perhaps flexion problem so improve this horrible solution to test it
And this is the video test, yaw issue stop so now I need ideas to make this better, I´m finishing a 3D print and think that a more rigid arms separators perhaps help.
Test is in qstab and qhover with standard params, and without plane prop, at the video end I try to take off in FBW to check what happens but it couldn´t take off at maximun throttle, it´s correct response? or it going to loose energy when I try to change to forward fly?
Nice progress. So what props are you using on these sunnysky motors ? What battery 3S or 4S ? What’s the total weight of your quadplane ?
Thank’s Hugues. The props are 9*5 cf and weight 3 kg with two 5200 3s batts in parallel.
Thx. For 3Kg, you need at least 750 grams of thrust per motor to hover. Do you know you could then use the T-motor F80 (or even a F40 or F60) fpv racer motor with 5" or 6" props to get this thrust. This would save some weight and thus gain endurance.
Helo guys,
Hugues, seriously? racer motor can do the lifting? Im planning to use Sunnysky 3508-700KV on my FX61 VTOL. But I think the motors are heavy. Pls comment. Thank you
Yes. Take a look at the F80 T-Motor thrust measurements : https://www.miniquadtestbench.com/t-motor-f80-2408-2200kv.html
Are those motors appropriate for high endurance because 1400kv motors usually consume a lot of power?
I spec’d out the F80 motors for a VTOL plane weighing 3kg. I couldn’t get the endurance I wanted. After a bunch of ecalc iterations, I choose to use 4 t-Motor antigravity 4006, KV380 motors. http://store-en.tmotor.com/goods.php?id=440
With a 8,000mAh battery, ecalc estimates more than an hour in plane at max efficiency. Obviously, that doesn’t include the power required to take off and transition to plane and back to copter for landing. But I am estimating i’ll get at least 30 mins in plane with a nice reserve, which will allow me to map several hundred acres per flight
This is all theoretical as I haven’t completed my build. I got side tracked repairing a crashed drone.
Really nice blog Cala. Well done!
Any updates to this fascinating build? I am going down a similar road with fx61 too.
Thanks Sea:
Finally this build fly but very short time, but an airplane drones company like my work and gave me their flying wing to develop a vtol over it so I stopped continue developing this one, is not the best platform choice, this airplane doesnt like fly with heavy payload I think, next step is going to transform in a tailsitter with only two motors
Ok, thank you Cala. I am almost done with my conversion of FX61 to VTOL. I hope to maiden in the next 2 weeks. I have been logging my build in a pptx file and may post that here or somewhere when I know it flies!!! I am not looking for long flights so just one 3S 5200 battery is enough for me. My all-in weight is 1840g. that is about 650g above the base kit built as a pusher only. I have really enjoyed this project and learned so much - I almost don’t care how it performs. lol
No, actually I do care. Link below is my maiden flight in Q_LOITER mode. Next week, when the weather clears, I will attempt a transition to FBWB and maybe test Q_RTL.

Nice, your setup looks much better than mine, you put the arms narrower than mine, that avoid arms much torsion that it was one of my issues, I follow your results,thanks for share, good luck with your first FBW



