Hi,
I have been flying some time with my quad. When I perform an Auto mission, it all goes as expected, but in every turn between waypoints I always have a warning in EKF: the color in the HUD goes yellow and in the EKF Status I get a compass value greater than 0.5.
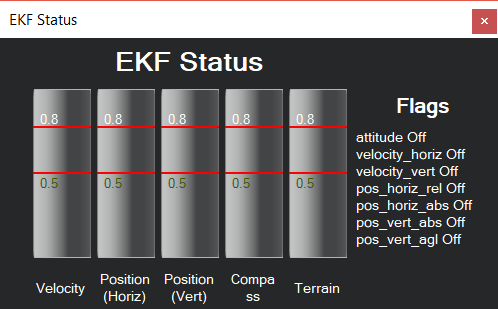
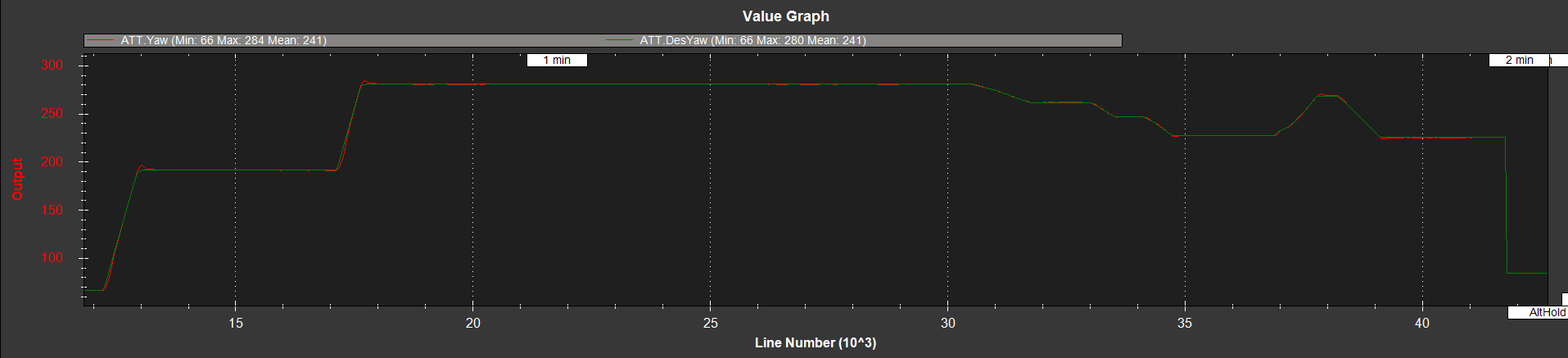
I was reading some posts and found that this could mean that the yaw values are not exactly following the desired yaw values sent by the autopilot. I guess that could be happening because I can see some spikes in the yaw values in my log when the copter turns (there is some overshoot in yaw).
This could be all, but I also wanted to plot both the internal and external magfield to check whether there was something there. What I found out is that my values are normally around 350 (don’t know the units), but when the copter turns, the magfield2 (internal) goes down to around 150, while the magfield (external) doesn’t change that abruptly. That was during flight, I don’t know where to find this value in the logs to show them to you.
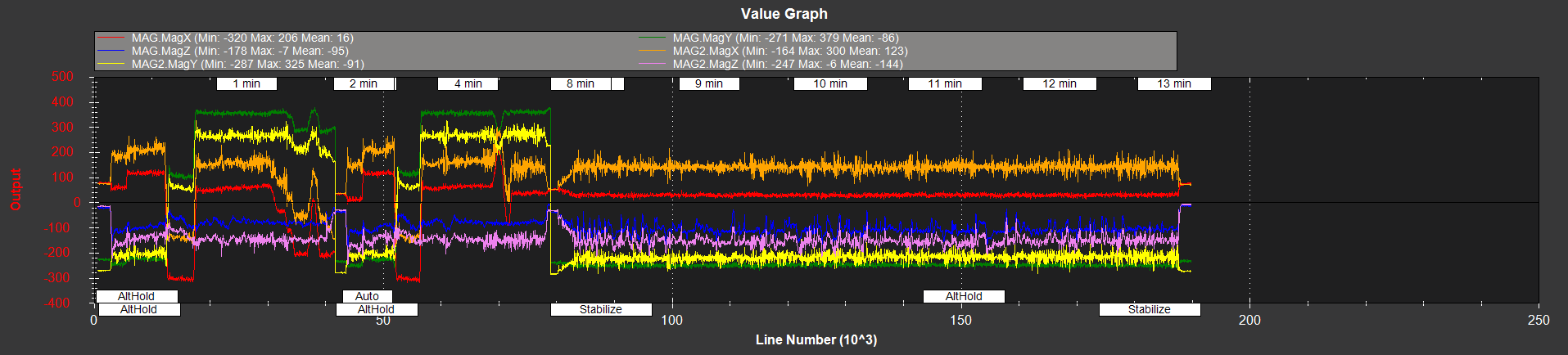
Moreover, I can see the mag values of both internal and external compasses in the logs. It seems that all mag values are following the same tendency, but when the copter turns, the difference between MAG.MagX and MAG2.MagX becomes much greater than the other pairs. In the second AUTO flight, I moved the yaw manually to check this effect while landing, and you can see both MagX moving, but the difference then was not that large.
Finally, when using the log analyzer, I got a large change in mag. field, which seems odd since I was flying above grass in an area where I don’t have magnetic interference.
Log File D:\Javier\Documents\Mission Planner\logs\QUADROTOR\1\2017-06-30 16-39-24.log
Size (kb) 15010.0146484375
No of lines 189772
Duration 0:13:27
Vehicletype ArduCopter
Firmware Version V3.4.6
Firmware Hash e707341b
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Brownout = GOOD -
Test: Compass = FAIL - Large change in mag_field (65.94%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.19, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = GOOD - Motor channel averages = [1576, 1615, 1582, 1590]
Average motor output = 1591
Difference between min and max motor averages = 39
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = GOOD -
Should I worry about this behavior? I hope you can help me to identify the cause of this issue, since I’m not sure if this is something that can be dangerous in the long run. I am attaching the log for reference.
Thanks!