PROBLEM: Pixhawk2.1 is making double entry for each camera trigger in the dataflash log. This is a real PITA as makes it very hard to goetag images.
This does not seem to be an Arduplane problem. It does not happen with 3DR Pixhawk or even Pixracer. Happens on both Arduplane 3.7.1 Arduplane and 3.8beta4 (even beta5). Very easy for anyone to replicate so I shall not attach log unless you see a reason why I should.
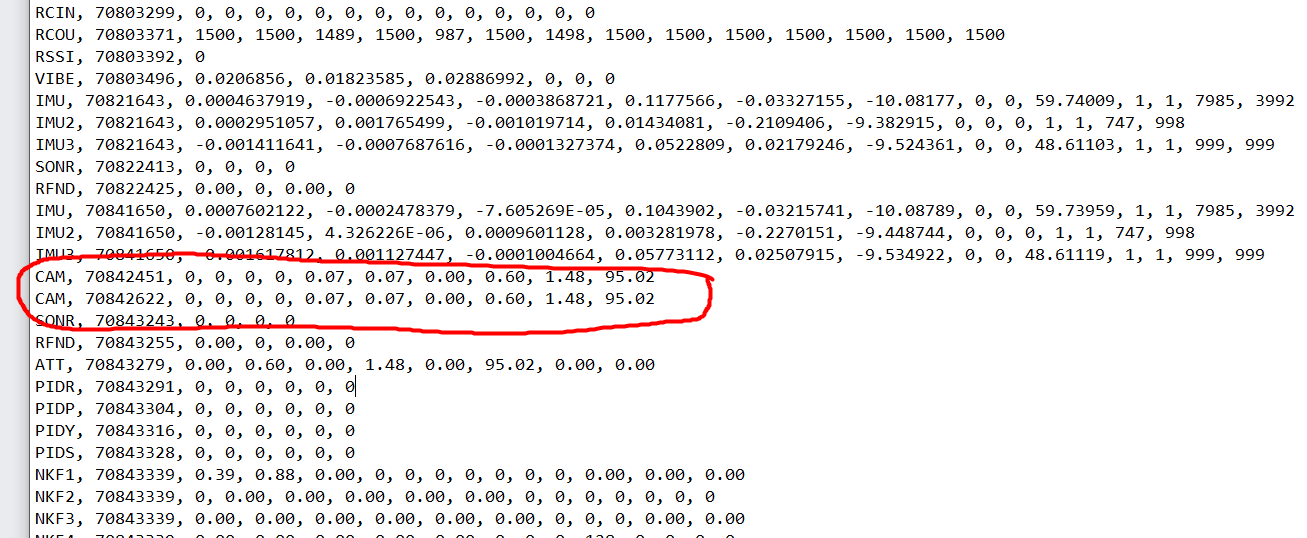
Have tested on 3 differnt pixhawk2.1 units. I asked a friend to test his also, same results. You don’t even need it installed in anything. Just put on current or even beta Arduplane firmware (I never tried copter), then set arming requirement to 0 and arm (just on your table), then go to main screen and right click on map and do a “trigger camera now” actual (aka manually simulate camera trigger). Now download your dataflash log from the Pixhawk and look for cam command line deep inside (see sample picture below). You will find two different entries. NOT GOOD.
We use these entries to geotag the images. When there is no secondary GPS why does it make two entries for each trigger. These one in the picture are with empty co-ordinates as there was not GPS, I just made it on my desk now.
The most curious thing is why I have not seen anyone report this so far? At least a few thousand people must be using pixhawk2.1 by now. Please help us sort this out. I think it might be some weird bug related to secondary GPS possibility or something. I say again, this problem (with same firmware) does not occur on 3rd Pixhawk or Pixrace, so it is not Arduplane bug or not entirely. Also it is from dataflash, so Mission planner is eliminated from the equation also.
I will also post same thing from actual flight, the interesting thing is that the data in the two lines do not match entirely, even though configuration is quite stock and there is only a single GPS on board.
Even though I have emphasized this to be pixhawk2.1 related, here is hoping that some of the very smart brains in here can offer an idea as to what is the reason for this or simply have a workaround that we could use which is not putting the million of lines into excel and making a macro to find and remove duplicates.
This one is an example from a real mission:
