Exactly.
actually I used:
P = 0.6 * P_crit
I = (2 * P) / T
D = (P * T) / 8
because there are different approaches for that when you google it. Didn’t know before…
Now I will test both of them.
Exactly.
actually I used:
P = 0.6 * P_crit
I = (2 * P) / T
D = (P * T) / 8
because there are different approaches for that when you google it. Didn’t know before…
Now I will test both of them.
Have been flying today and crashed a lot
Crash: Been flying in FBWA and wanted to backtransition. switched to Qloiter an nothing happened. Tried three times and then wanted to land in FBWA. Was to low and crashed into a tree. Actually ALL of my SD-Log stopped very early this day for no reason, so I only have the tlog.
https://www.dropbox.com/s/nv01miyd2ii8wjl/2017-09-23%2012-07-11.tlog?dl=0
Crash: Switched to FBWA in 4m and plane got too low while transitioning.
FYI: Are the results from that implemented in Arduplane?
http://www.springer.com/cda/content/document/cda_downloaddocument/9783319515311-c2.pdf?SGWID=0-0-45-1612588-p180523070
https://www.inf.ethz.ch/personal/pomarc/pubs/BapstIROS15.pdf
Thank you for the reply.
Of course I will wait. I asked in order not to miss the release.![]()
Kind regards Otto
Probably 10 times to high. My wing 900 gr Wing shakes due to the reaction of the motion of Tilt and/or Elevons already without running the mots.
0.003 ist the upper limit.
did the SD log stop near the time when you switched to QLOITER?
Can you upload the SD logs as well?
Ok, shame on me: Backtransition was not working because of me being absolutely stupid, switching into normal Loiter and not QLoiter. 
ahh! I’m glad you let me know. I was just starting to analyse the tlog.
Sure, here they are:
In the meantime, I feel safer in FBWA.
Therefore here a closer look at the described backtransition.
May help for the new one.
When flying a tailsitter, do these parameters actually do something?
Q_TRAN_PIT_MAX
Q_TRANSITION_MS
Q_ASSIST_SPEED
Q_ASSIST_ANGLE
Q_WVANE_
@Tridge,
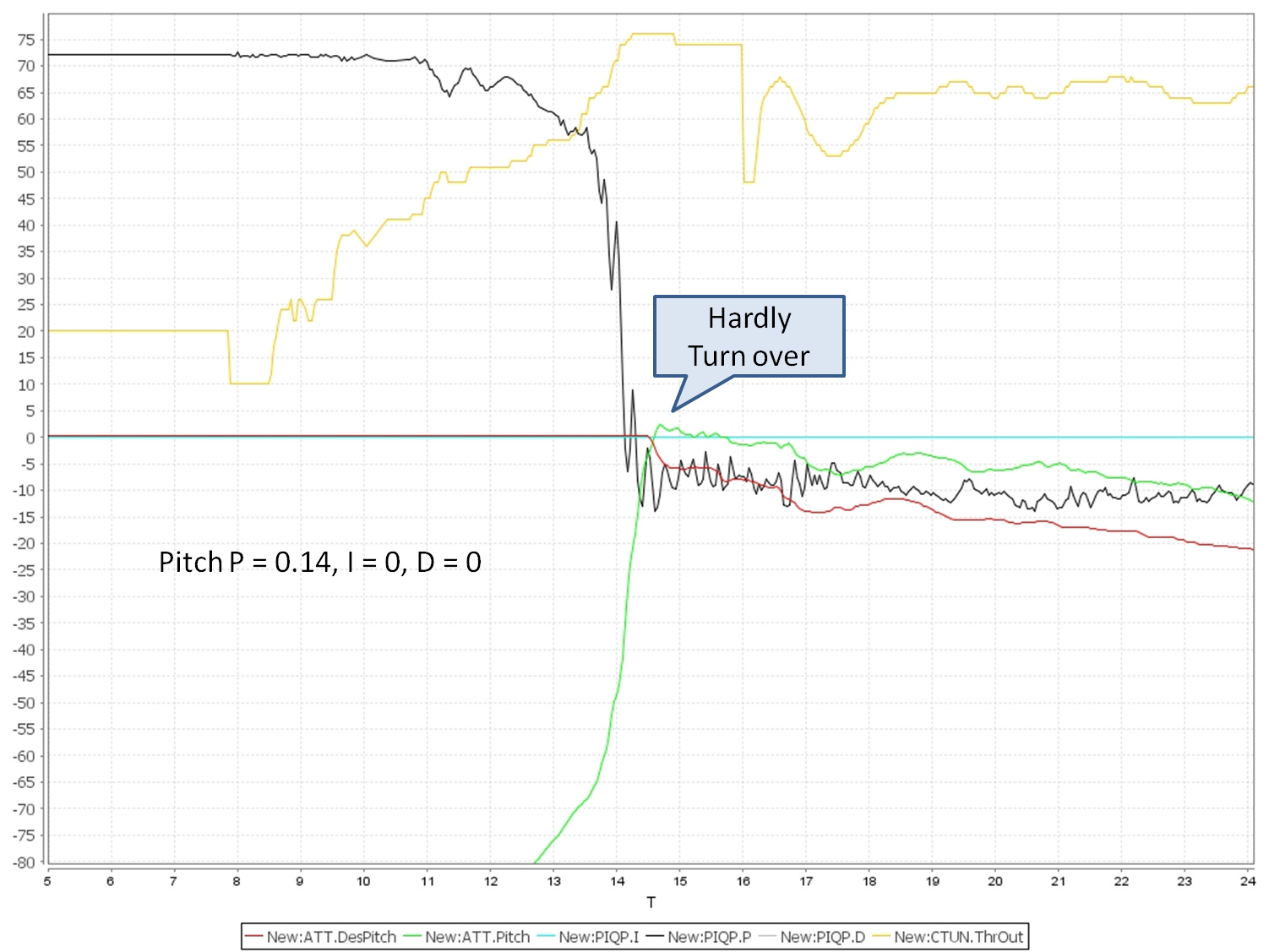
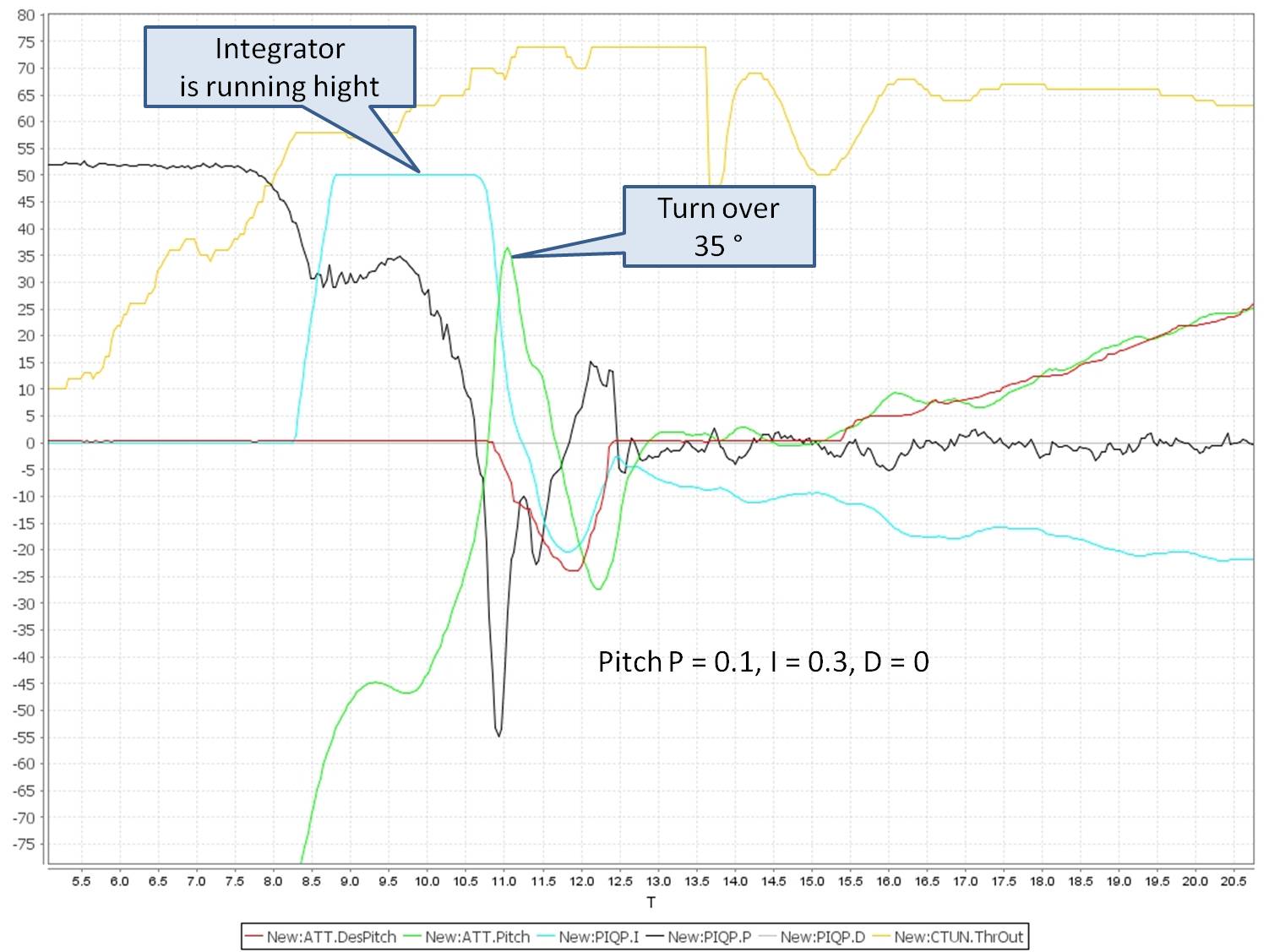
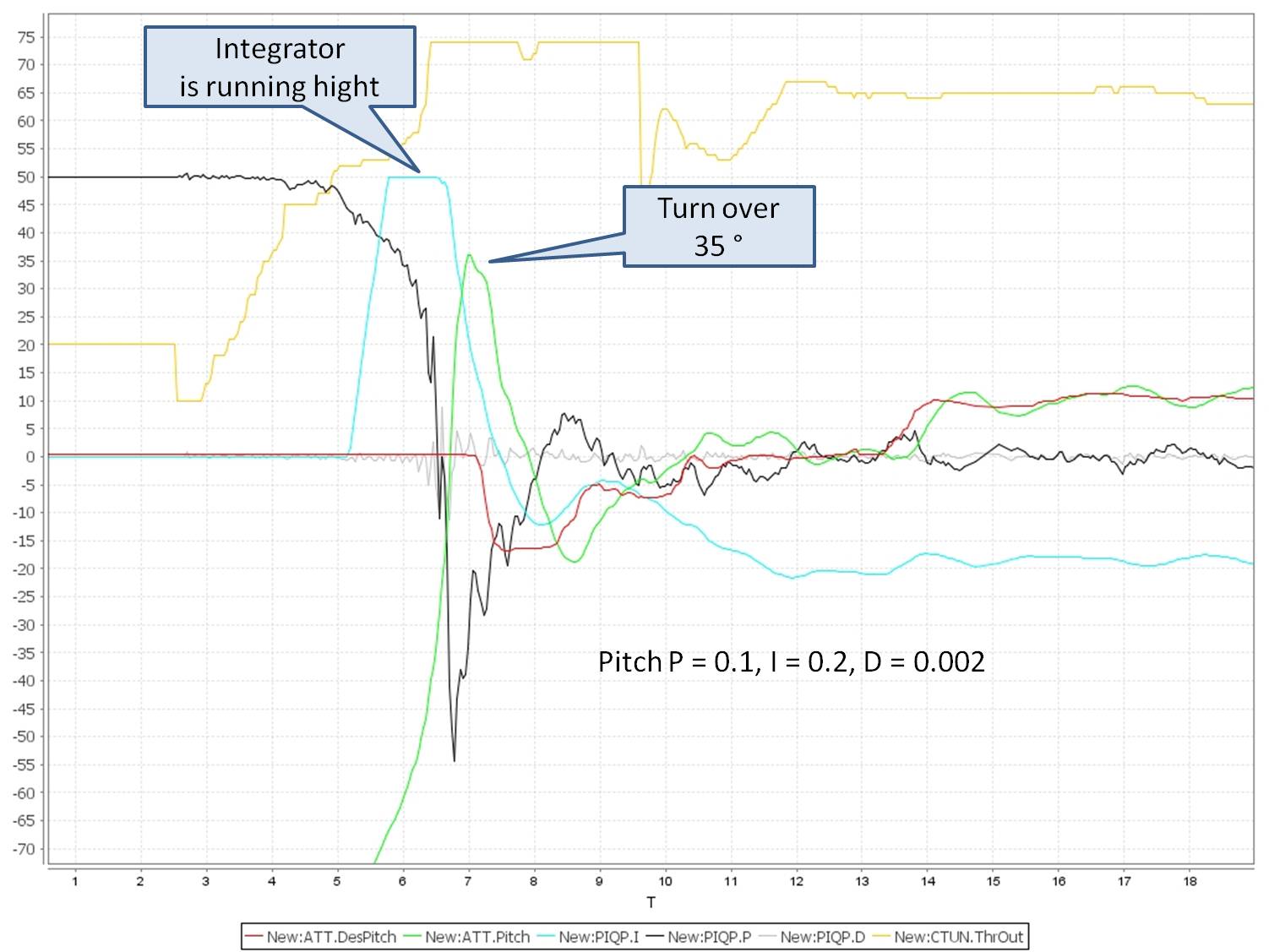
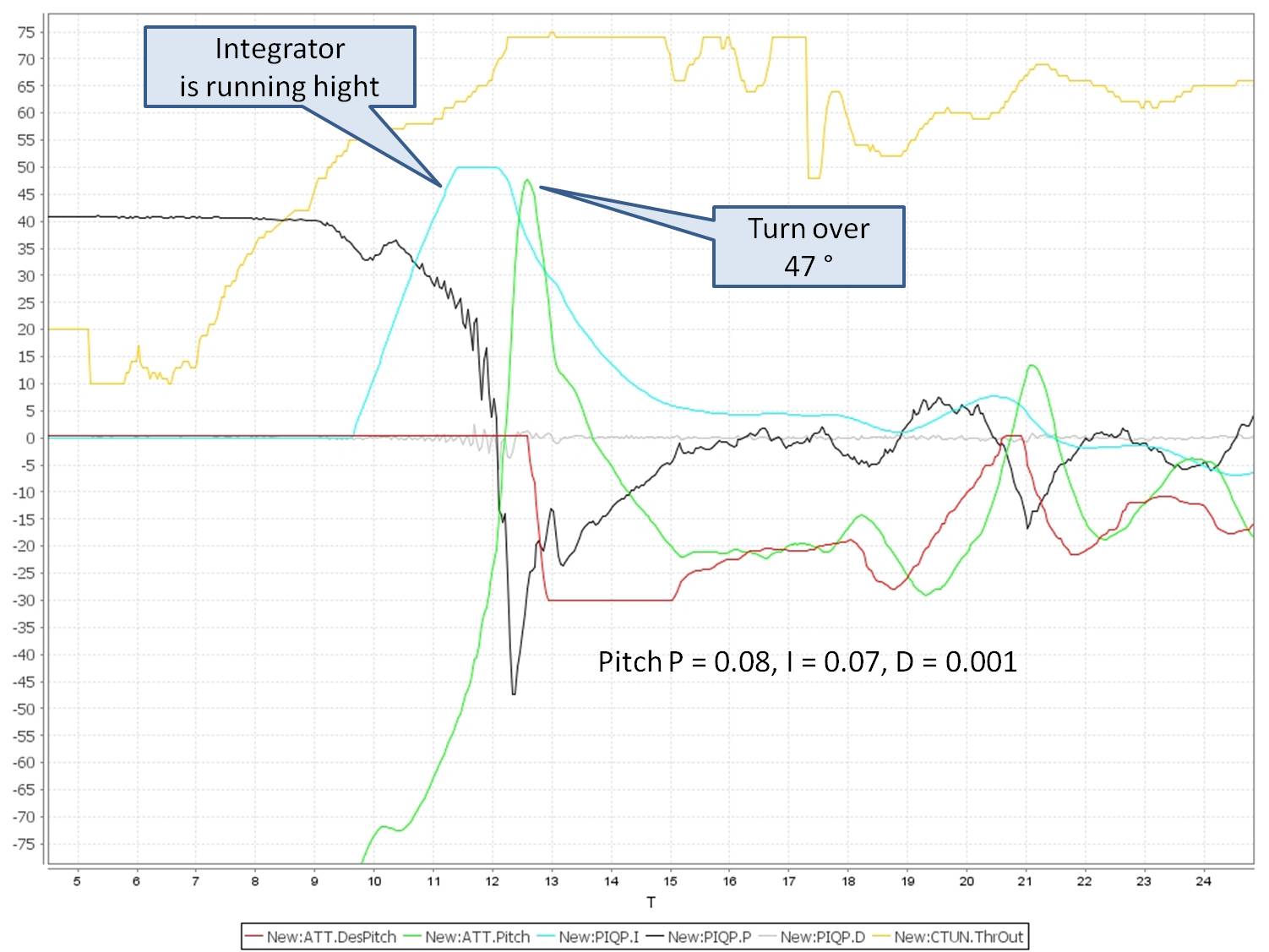
As recommeded I increased Pitch I > 0.
This produce a critical Lift off with tilt over
During the slow or cautious start Phase the integrator is running high, and comes down according his value.
To show what I mean, the short video and the following Graphs.
The transitions are similar special control cases.
May a reduction of Q_PIT_IMAX help, or do you know a better solution?
Need some help, just build Skywalker x5 vector tailsitter, not fly yet, testing on ground, everthing look good, except speed of tilt servo, it is so fast when I change fix wing /copter mode, is this normal?. I try to change parameter Q_tilt_rate_dn/up but no effect. is there any paramter can let it down?
Dick
Yes. Q_tilt _rate _dn/up is only for VTOLs with tiltable motors or wings.
Rolf
Thank Rolf,so there is no patameter can adjust tilt servo speed of tailsitter.
Tridge is about to renew the “program logic” for backward transition. Forward tranistion is ok.
Until then you perhaps can try to adjust the Q-PID and associated parameters a little bit more “soft” for transition without loss of authority while hovering. But it isn’t trivial.
Q_TAILSIT_VHGAIN
Q_A_RAT_xxx_FF
Q_A_RAT_PIT/YAW/RLL_P/D/I/
Rolf
Edit: Transition with actual firmware:
Hi, Tridge
sent some logs via google if you have time to take a look
thanks
Rick
Still having desync issues.
Also here you see that in some cases the max deflection angle of the control surfaces are not enoght. Anyone got any tips for me?
Can you upload the SD logs ?
Rolf
Wanted to share my maiden with no tuning:
Next steps are to tune and work towards transition to forward flight. Great job @tridge on the code and everyone providing support in this group. It’s been very helpful.