Thanks Rolf. Are there any photos or a build log of your aircraft, or a similar build? I am curious about the build details of the tilt mechanisms. With 800+ posts in this thread, serial search is somewhat daunting.
Kelly
Thanks Rolf. Are there any photos or a build log of your aircraft, or a similar build? I am curious about the build details of the tilt mechanisms. With 800+ posts in this thread, serial search is somewhat daunting.
Kelly
hi
i have q
… how to make airspeed senser off in qgraoundcontrol as a pixhawk tailsitter mode
Like this
The servo weight 12.5 gr.
Regards, Otto
in case anyone here missed it, here is the result of the great work @lorbass has been doing creating a TVBS model in RealFlight8:
Awesome! Great work!
Now I have to buy RealFlight 8 and convince my wife it’s a tool, ya right, oh ya, a better computer too… honey…wish me luck…thanks Otto+Tridge
Hi,
I have tested the modified airframe. The result seems to be good. More stable in hover especially after moving CG back towards neutral point (in fixed-wing perspective). I will do more tests in a wider area for transition.
In additional to control surface modification, I also use a new firmware Arduplane 3.8.3. I realized that some default values of certain parameters have also been changed. So, I’m not sure if it because of larger control surfaces or PID value that help to achieve more stable hover.
But after looking at you picture. I think your control surfaces seem to be small. Not sure which prop diameters of your plane. A bigger prop will also help incraese control surface area that is exposed to slipstream effect of propeller, resulting in more control surface effectiveness.
Cheers,
RW
Hey folks
Been flying yesterday.
Havnt retested auto, cuz too windy.
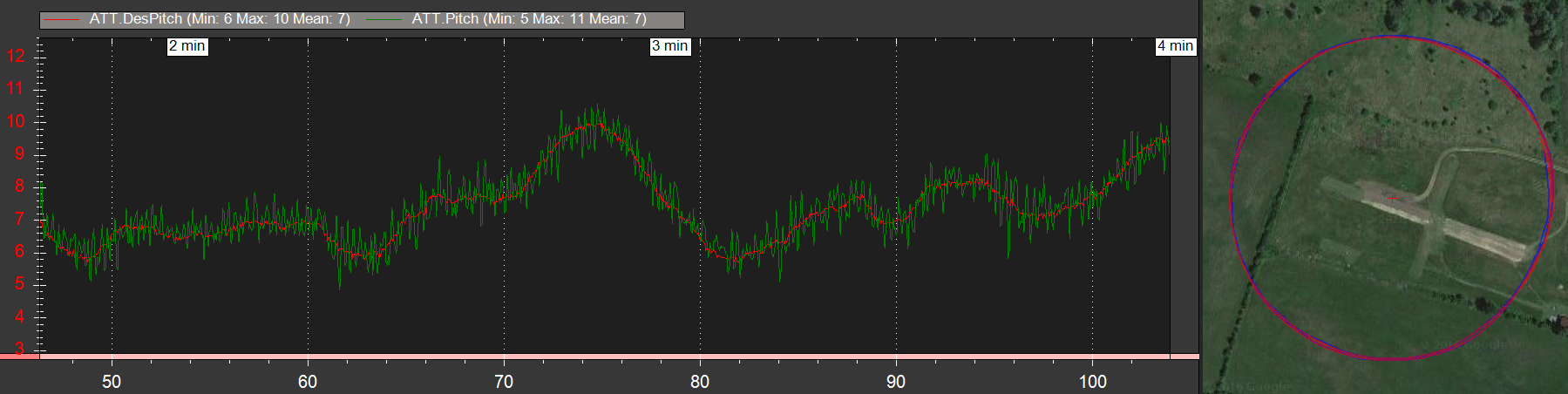
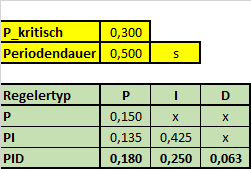
Tuned the forward flight PIDs of Pitch via Nichols Ziegler method and much better results now, though I have not set the exact correct PIDs due to lack of accuracy of me analyzing the video for the ozzilation frequency.
Results for Pitch: P_critical = 0.30 , freq_ozzi= 0.5s.
Was quite exiting cuz the plane ozzilated very hard, as you can see in the video.
Here second short flight with FPV chase:
Logs: https://www.dropbox.com/sh/fj5qi9gbm0vdrnt/AAAF6jhFalfi3_1FDAjgzFU5a?dl=0
(for some reason I only got non, or empty log files all flights before. But MP was not saying bad logging or any other fault. Dunno why)
Is there any way to get differential thrust mixed to the turns? I found that its flying much better if I put some yaw in the turn, but it does not do this automatically while in loiter for example.
Cheers, David
FYI working on a production model … got new pixhawk, cheap version, lots of vibration in stabilize mode, servos hunting just sitting nose up, ok in hover and manual mode,… tried to read sd card …not readable, defective,but no indication til I removed it to download, replaced it, also thinking firmware may also be corrupt, not tuneable, zero out everything I could think of but still hunting, reloading with latest and will test again…
Rick
Hello Sir,
Thanks for your reply, I updated my previous reply to you. I updated info on CG according to your guideline, I updated that CG good at Natural point.
Flight test of copter mode with updated control surface and CG with firmware Arduplane 3.8.3 is here . I found lot of improvement in copter modes.
I used 6 inch prop, 2300kv motor. Wingspan - 4 ft, total weight - 720gm
I used small size prop, there was two reasons, those motor and prop was available towards me, another reason was, I thinks in the view of forward flight 6 inch prop are good in the view of large tip speed requirement (2.5 * stall speed).
I need more test, and if I found need of large prop than I will update same.
Sir best of luck for your forward flight test, I will also test soon.
Well I found some difficulty , and need help on following points from all members.
Climb Sensitivity - Normally in ArduCopter the climb sensitivity can be set by THR_ACCEL_P and THR_ACCEL_I , but I couldn’t found similar parameter to set climb sensitivity of copter mode in Arduplane tailsitter.
Maximum Spin Control of motor for Copter modes - I couldn’t not found any output spin change in motor by set Q_M_SPIN_MAX . Please guide how we can control on spin at Arduplane tailsitter
Thanks
sorry for the slow response on this, I’m getting quite a long way behind on the forums this week.
I’ve reproduced the “knife edge” behaviour in RealFlight. It happens when the vehicle is rolled past the point where it can use differential thrust to bring itself back upright. It gets into a state of equilibrium where it circles in an attitude close to knife-edge flight. I’ve had it circling in RealFlight for a couple of minutes in that state.
I think it happens due to the following combination of factors:
I’ve fixed a bug this week (after 3.8.3 release, sorry) with transition to forward flight in AUTO missions. It does a really ugly transition in the 3.8.3 code after a VTOL takeoff in a mission. The transition tends to lose a lot of height too. I’ve fixed that in master and the 3.8.x branch so it does the same sort of transition it uses for QHOVER to FBWA mode.
Cheers, Tridge
yes, if you use KFF_RDDRMIX and RUDD_DT_GAIN you will get differential thrust in turns. You may find you need quite high values to produce a noticible effect, for example KFF_RDDRMIX=0.5 and RUDD_DT_GAIN=50
Hi palm369,
be aware what happens, if you apply too much differential thrust 
Dual-motor tailsitters
( beginning at 00:20 sec in the above mentioned film) :
Regards
Rolf
Thank you for the answers tridge.
I still dont get it.
AFAIK there is no point as you described. The system has always full authority to the axis which is controlled by diff thrust. This is the main idea behind the control algorithm developed by the ETH here: http://flyingmachinearena.org/wp-content/uploads/ritzIEEE17.pdf
Its correct that my tailsitter has a lack of thrust, but this can not be the problem here.
Can you post a video of the behavior you noticed in RF8?
As this tailsitter has its CG far back, it does not need to first have speed for pitching up. Having the flow of the prop over the flap is quite enough. This is exactly the reason i put the CG that far back, because its mandatory for the tailsitter to have this ability.
So this is what caused that? Could you please release a beta so we can test it?
Have been testing auto today. Tested it three times and three times it was going knife edge. After 10s or so wobbeling around like this it somehow stabilized itself and then was flying fine till the landing.
Vids following. This time i got logs 
Hi folks.
So here is the video of the second auto test I did this day. First one got no video cuz my runcam didnt record for any reason and the third one has broken log. This is driving me nuts. At least I have one flight recorded on log AND video…
LOG: https://www.dropbox.com/s/xmbosuz11qjogvx/00000005.BIN?dl=0
Exchanges the Pixhawk for a brand new one and you can see this one has some problem with the baro. Measured pressure is way off (like half of normal) and also for any reason my airspeed sensor is not working anymore.
Also take note of the big diffrence of the pwm signals going to the motors at hover. This might be caused by this crappy escs drifting and not having a crystal for temp compensation. In hover this does not realy matter, but when it going in plane mode, both escs get same signal but outputting diffrent thrust, resulting in the plane pulling to one side. (left in my case)
I tuned the forward flight pitch PIDs using Ziegler Nichols Metode. I put just a P value in in one flight and measured the oscillation frequency out of the log. Here you see the results which I consider superb:
But you can also see in the video here that when the plane controller takes over it has huge oscillation first and settling then. https://www.youtube.com/watch?v=nYMIBnSBdUE
log: https://www.dropbox.com/s/hwuwap5g51me2jj/00000003.BIN?dl=0
I dont understand why this is happening when the PIDs seams so well tuned on the other hand.
I now use PID + FF on the pitch axis. Also tried only PI + FF but plane crashed due to this.
Fat values is what I used in above flights:
Cheers, David
Hello palm,
I also tried an auto mission with my tailsitter this afternoon and I got the same result. Just the knife edge was right side. Looking at my log and rcout 1-8 I can see that as soon as the nav command ID16 (the end of the takeoff, so goto WP1 I think) is done there is a drop in RC5 and RC6 (ESCs for me) followed by a sudden increase (from 1350 to 1750 in 0.1s). At the same time RC3 and RC4 (tilt motor for me) goes to steady neutral. As my gain Q_tailsit_VF gain is 0 I think it means the wing fly no longer in copter mode but in fixed wing. Without speed, without differential thrust control and with sudden throttle increase it is very normal the wing become uncontrollable.
I will make some more flight to see if this is true or not and search for a solution
Pierre
Some enjoy Realflight, others enjoy real flights
Perfect tranistions with arduplane 3.8.3