Sure, here they are:
In the meantime, I feel safer in FBWA.
Therefore here a closer look at the described backtransition.
May help for the new one.
The log: https://drive.google.com/open?id=0Bxldq38bfbqHYXFBb3dQcVZaYkU
Regards, Otto
When flying a tailsitter, do these parameters actually do something?
Q_TRAN_PIT_MAX
Q_TRANSITION_MS
Q_ASSIST_SPEED
Q_ASSIST_ANGLE
Q_WVANE_
@Tridge,
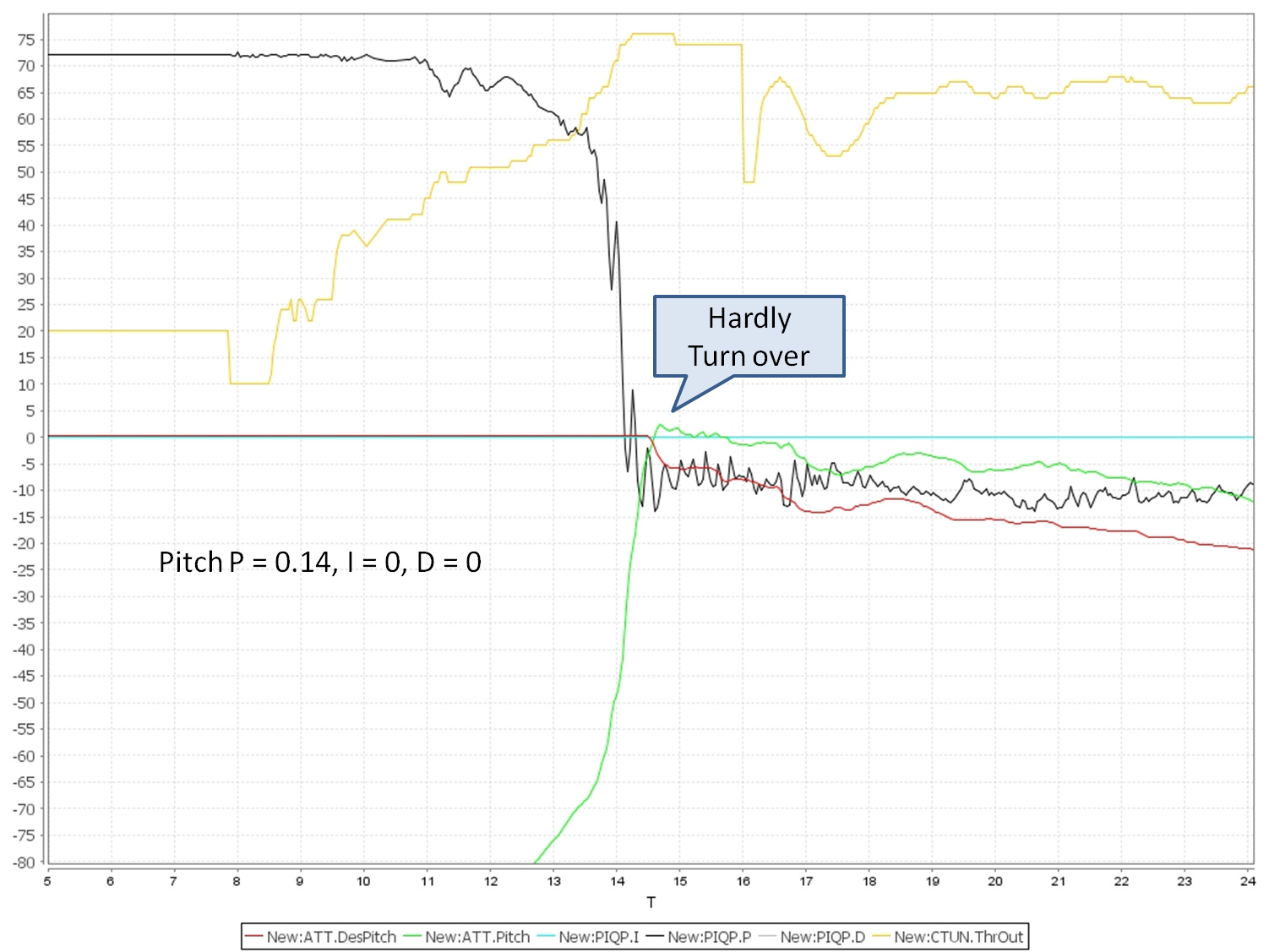
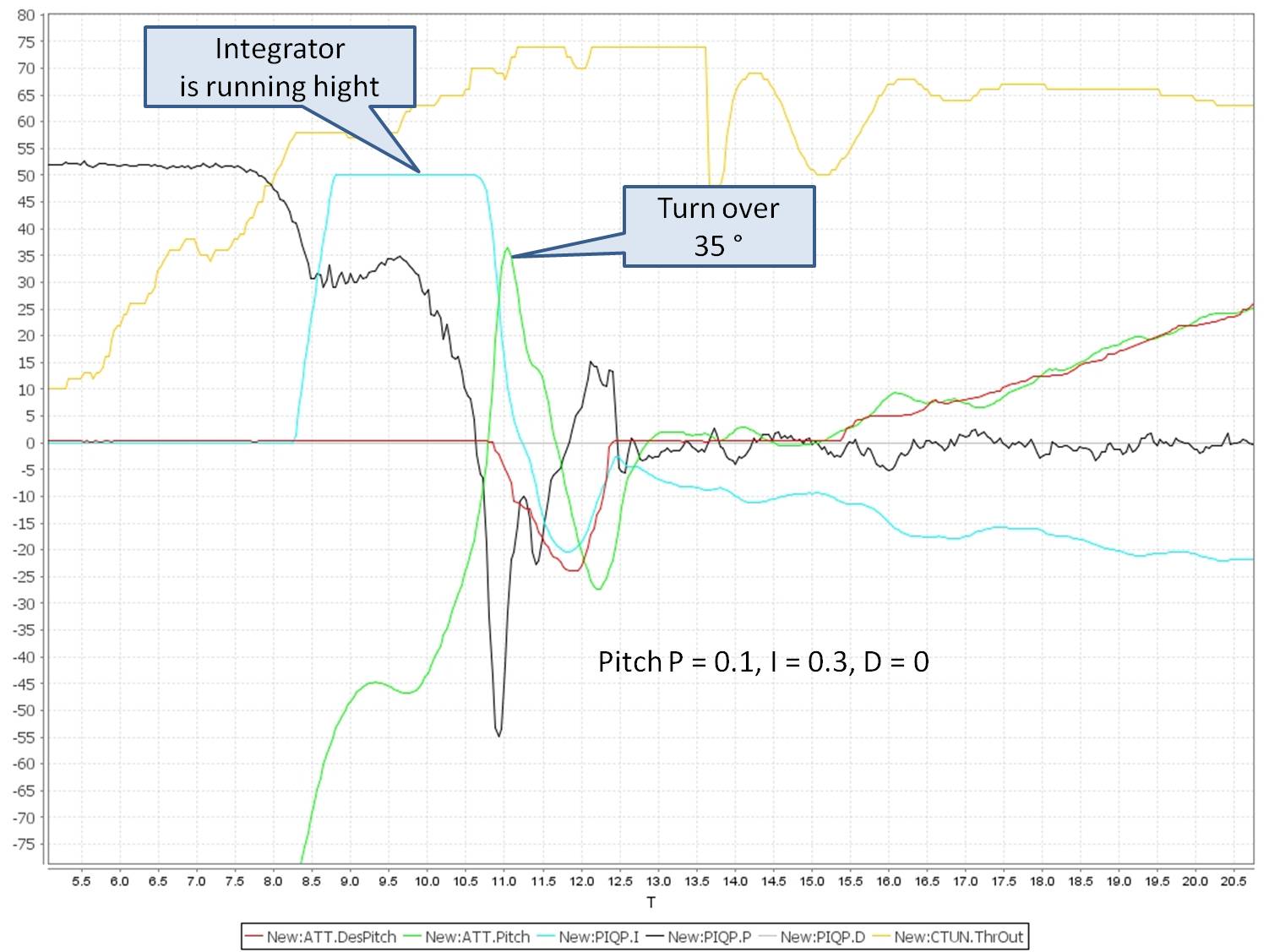
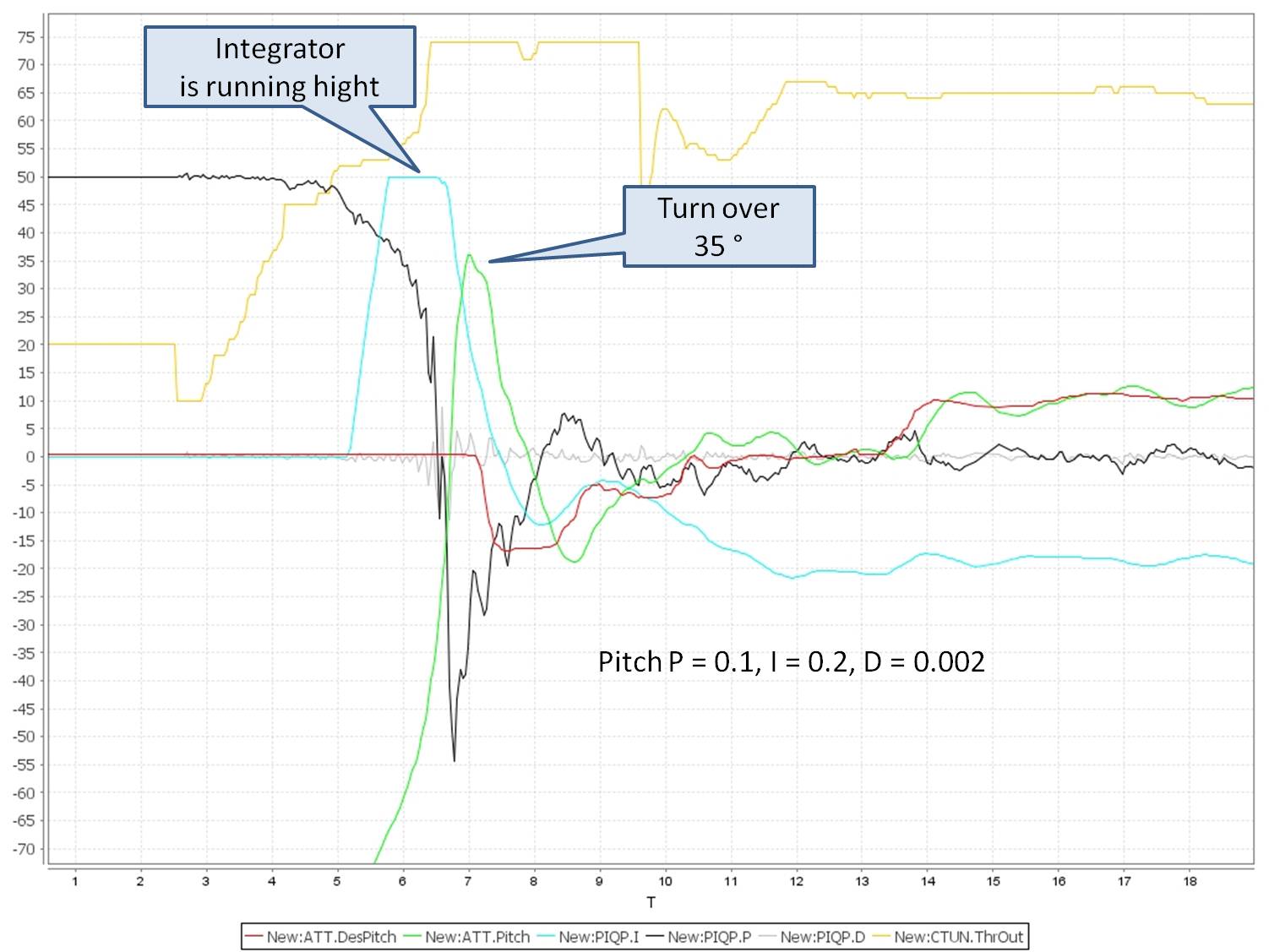
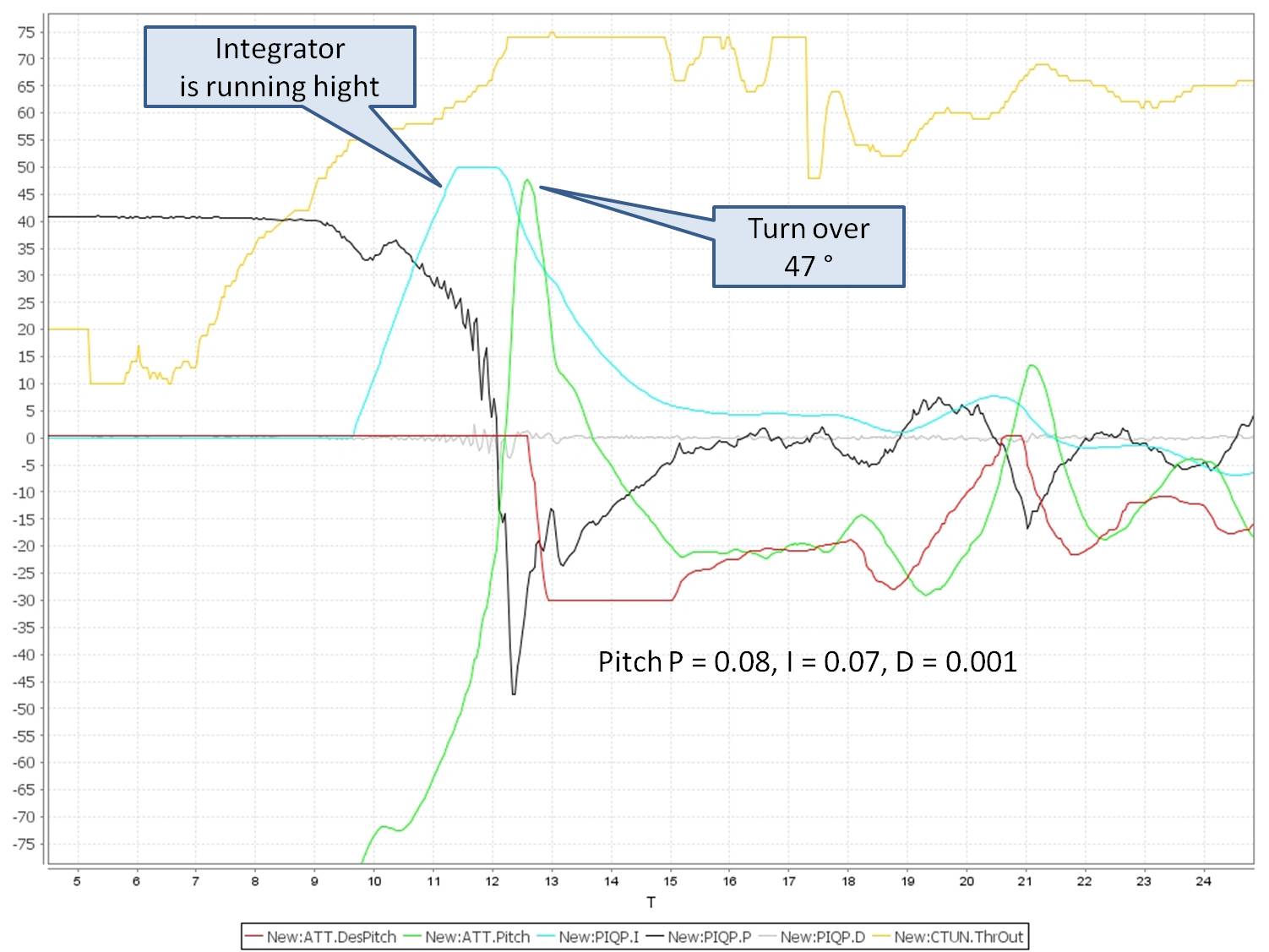
As recommeded I increased Pitch I > 0.
This produce a critical Lift off with tilt over
During the slow or cautious start Phase the integrator is running high, and comes down according his value.
To show what I mean, the short video and the following Graphs.
The transitions are similar special control cases.
May a reduction of Q_PIT_IMAX help, or do you know a better solution?
Need some help, just build Skywalker x5 vector tailsitter, not fly yet, testing on ground, everthing look good, except speed of tilt servo, it is so fast when I change fix wing /copter mode, is this normal?. I try to change parameter Q_tilt_rate_dn/up but no effect. is there any paramter can let it down?
Dick
Yes. Q_tilt _rate _dn/up is only for VTOLs with tiltable motors or wings.
Rolf
Thank Rolf,so there is no patameter can adjust tilt servo speed of tailsitter.
Tridge is about to renew the “program logic” for backward transition. Forward tranistion is ok.
Until then you perhaps can try to adjust the Q-PID and associated parameters a little bit more “soft” for transition without loss of authority while hovering. But it isn’t trivial.
Q_TAILSIT_VHGAIN
Q_A_RAT_xxx_FF
Q_A_RAT_PIT/YAW/RLL_P/D/I/
Rolf
Edit: Transition with actual firmware:
Hi, Tridge
sent some logs via google if you have time to take a look
thanks
Rick
Still having desync issues.
Also here you see that in some cases the max deflection angle of the control surfaces are not enoght. Anyone got any tips for me?
Can you upload the SD logs ?
Rolf
Wanted to share my maiden with no tuning:
Next steps are to tune and work towards transition to forward flight. Great job @tridge on the code and everyone providing support in this group. It’s been very helpful.
2 Likes
Congratulations Dennis! Very nice build.
As usual, DF logs can be a big help, although I should mention that I have a bit of a backlog of log analysis at the moment 
1 Like
so do you think your motors lost sync when you went from FBWA to QLOITER? It certainly did lose control very rapidly, but I wouldn’t have guessed that was caused by loss of motor sync. Can you explain a bit more of the background on your “desync” issue?
clearly it lost control badly when going from FBWA to QLOITER. I think the problem is that we don’t really do a proper transition from fixed wing to hover in tailsitters. It just goes straight to a hovering mode without first trying to bring the nose up. The transition is just too sharp.
I’m planning on fixing that by adding a transition stage where the aircraft is still being flown as a fixed wing, but bringing the nose up as fast as it can, then switching to the hover controller once the maximum pitch angle for fixed wing flight is achieved, or if the pitch rate drops below a threshold (so it is no longer able to pitch any further).
I probably won’t get that done for 3.8.3 though, it will likely be 3.8.4 at this stage.
hi Caleb. When you ask for help with logs, please try to do some preliminary work at the very least. Offering a download link with 10 files without any notes on what is in them is not useful. I don’t have the time to download and wade through that many files.
Here are some guidelines on logs for analysis:
- look at the logs yourself first with one of the available tools for log viewing.
- Work out which of your logs is actually interesting and needs analysis. Pick one log if possible. If absolutely necessary to show some feature, then pick two logs.
- only upload the *.bin logs (the dataflash binary log format)
- for the log you want analysed, write some notes on what happened from the pilots point of view, and what you need help to explain. “had some troubles” isn’t enough for me to know what to look for.
Just so you understand, it often takes me an hour or two to analyse someones logs. I don’t want to waste time on looking through logs that aren’t interesting. So when someone just puts the contents of their SD card from a days flying up for download then I usually just ignore it. I don’t have time to do the preliminary work for them, sorry.
MANUAL mode doesn’t do any stabilisation or transition, so it really isn’t useful for a tailsitter. You can’t hover in MANUAL (unless you are a really top class 3D fixed wing pilot). Even if you manage it, it doesn’t have anything to do with the autopilot code - it is just about pilot skill.
Cheers, Tridge
A question not related to tailsitters, what do you use to show the telemetry data on your video ?
Is it done using the data flash logs in post production ?
We understand your situation.
Here I had a question with detailed videos and graphs to show the situation in order not to waste your time.![]()
To lower Q_A_RAT_PIT_IMAX to 0.25 did not help.
May be Param D could help, but this is limited to a verry low value due to mechanical feedback which cause a shaking wing with motors off.
Can you recommend another method ?
Regards, Otto
Yes. But this is a problem with my propulsion setup and not of AP. When going from low rpm to high very fast, then the ESC loses sync to the motor. I can reproduce this on ground. I changes the motor from the Multistar 3508 580kV to the Tiger MN4012 480kV and tested it on ground, not noticing any desync. But in the air it still happens. I now will change the ESCs from the Multistar 30A V2 ones to Hobbywing X-Rotor 40A. Flying on 6s.
Also did you see what happens in the Video on 28s? Wind is coming a bit from the right. The wing is pitched and the surfaces are at max deflection. Wing is still not able to get nose up again till I give additional thrust. You can see the red indicator at the Cessna Symbol for the demanded pitch angle. The Cessna is the actual pitch angle. Any Idea why this happens?
Also is anybody here able to make an scientific statement whether it is better to have the CG more in the front or more in the back of the plane to overcome this problem in the Video at 28s?
After an initial thinking I got this:
- CG in Front: more lever for the forces of the control surfaces, therefore greater momentum to compensate pitching
- CG in the back: more equal force distribution from attacking wind forces orthogonal to the Wings surface around CG → Less weaker momentum pitching the wing more in wrong direction. But may get difficulties when in forward flight with CG too far back.
So where to put CG?
Your idea that it is related to the CoG is a good one, but I don’t think the primary problem is fore-aft CoG, I think it is the “belly heavy” versus “back heavy” CoG.
The integrator for pitch in the multicopter controller is hitting the maximum negative limit. That means it is always fighting to push the nose down. That implies that the weight is too much towards the “top” of the aircraft (when viewed in forward flight). That makes it tilt back.
CoG in a tail-sitter is a 3D problem. In a normal fixed wing most people treat it as a 1D problem, and move weight either to the front of the plane or the back. In a tailsitter you also have to consider moving it towards the “top” or the “bottom”.
In FBWA mode (so in fixed wing) the logs show your plane is a little bit tail heavy. If you move the weight much further back in fixed wing mode then you’ll start to lose stability in fixed wing flight modes.
In QLOITER you are a bit “top heavy” (or “back heavy” from the point of view of being nose up). So shifting some weight from the top of the plane to the bottom will help, or burying the weight a bit deeper into the plane.
I know this can be quite hard to organise, but it will really help.
Cheers, Tridge