I’ve never considered flying a tailsitter in STABILIZE mode instead of QSTABILIZE; where did you get the idea to do that, and do you know how it differs from QSTABILIZE?
i’m sorry, i don’t have video. but tomorrow i’ll record my test flight.
i flight with qstabilize to stabilize mode because i can flight the plane with manual mode. and i have test the respond of servo is right at stabilize mode.
I am still running into trouble in getting my servos to respond at all. I have motors running correctly, and I also have checked the servos to make sure they operate.
I have motors on Outputs 1 and 2. I have Y-splitter servos in Output 5 and 6. I have a V-tail setup with two servos on each tail.
I am attempting to test the servos by putting the drone in Manual mode and arming the drone. No responses at all.
I was powering the Pixhawk form the USB port, but I read that there wouldn’t be outputs in the servo rail. So now I am powering from the Power port using a power module.
This is not the right place for “Tail” Plane questions.
And for 2 Motor Tailsitter (VTOL) the Servos are on CH 1 and 2, the motors on Ch 5 and 6.
For 2 Motors vectored Tailsitters the Motor Tilt Servos on Ch 3 and 4
Here:
SERVO1_FUNCTION=77, Left Elevon Output 1
SERVO2_FUNCTION=78 , Right Elevon Output 2
SERVO3_FUNCTION=75, Left Tilt Servo, Output 3
SERVO3_MAX = 2070 , 90° up
SERBO3_MIN = 900 , 90 °down
SERVO4_FUNCTION=76 , Right Tilt Servo,Output 4
SERVO4_MAX = 2100 , 90° up
SERVO4_MIN = 900 , 90 °down
SERVO5_FUNCTION=73 , Left Motor Output 5
SERVO6_FUNCTION=74 ,Right Motor Output 6
Yes, on the Servo Rail is no Power (5 Volt)
With safety Switch enabled, the Servos are moving only if the Safety switch is On.
hi everyone, plane 3.8.0 is out, with dual-motor tailsitter support. I’ve like to offer a huge thank you to everyone in this forum for helping with the testing of this release!
This is more coming on the tailsitter front, with pending patches from @kd0aij and @priseborough that will take it to the next level, but I’m delighted that we’ve got a release out with support for these aircraft!
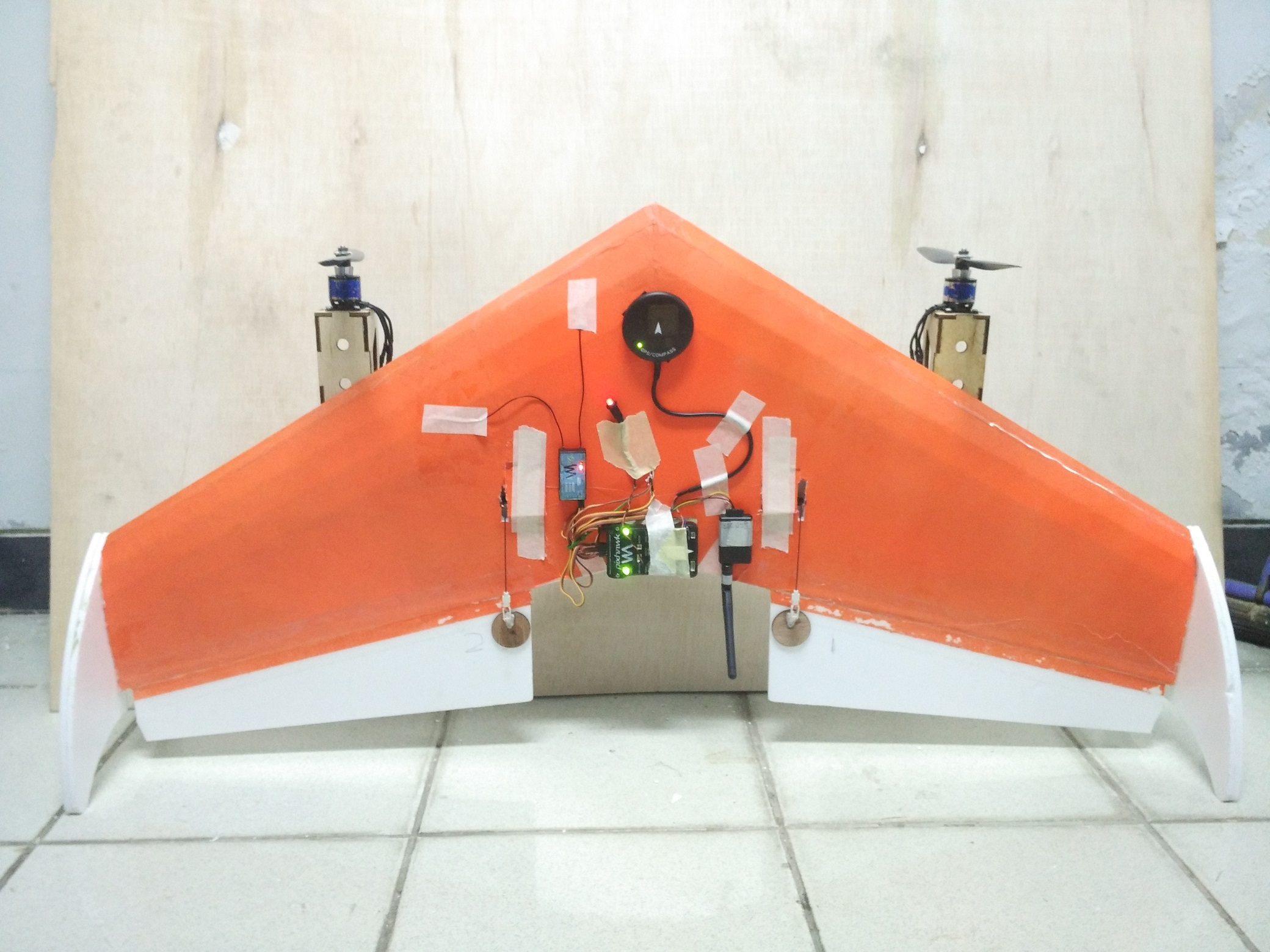
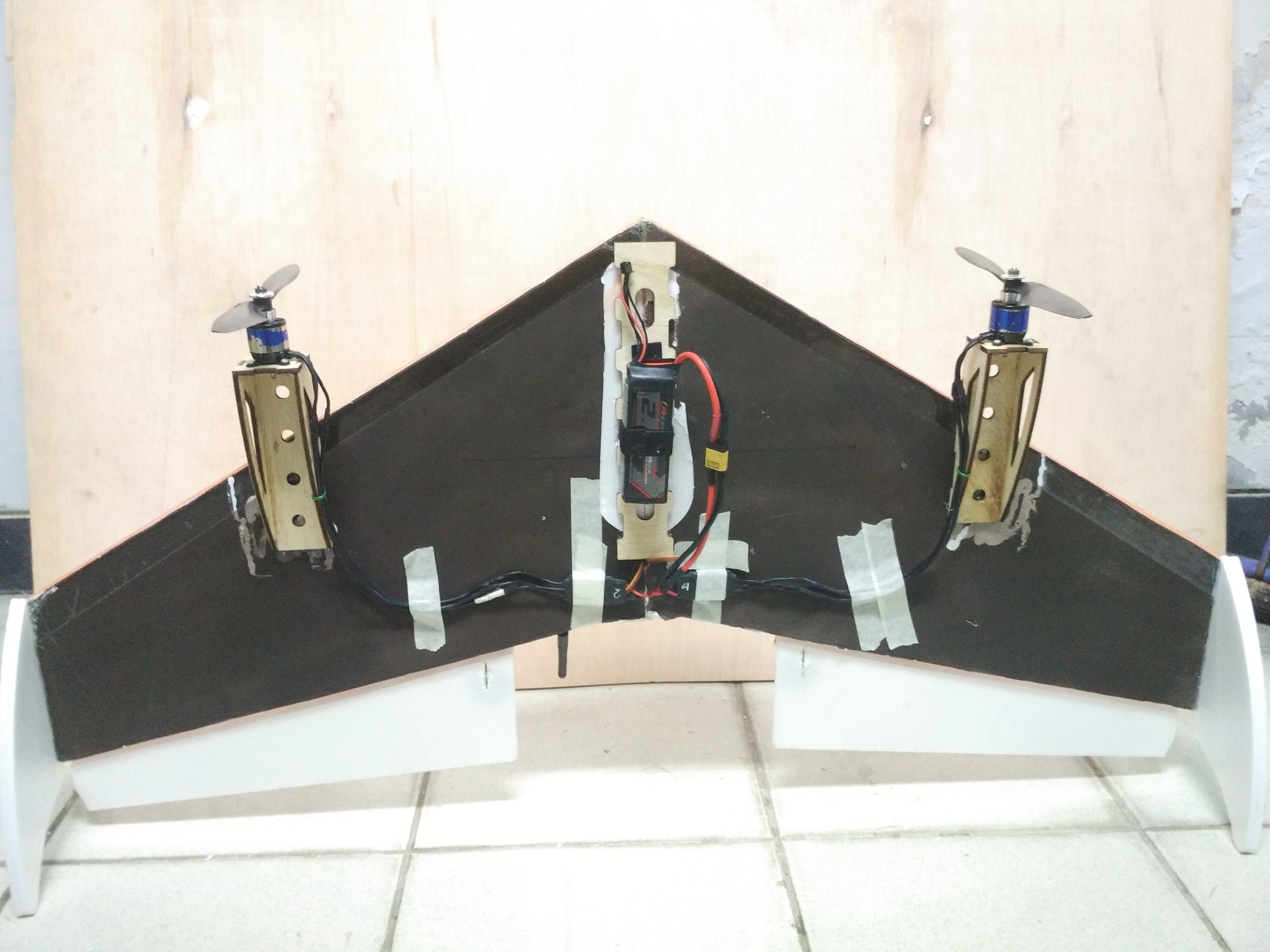
Airframe is based on FliteTest Versa, this is maiden flight, flight mode was Q_HOVER. After some basic attitude respon test, the plane suddenly pitch up and go backward. I used the new Plane 3.8.0, log file will be uploaded soon.
Tomorrow I will test it again, and hopefully I can test the transition and FBWA mode (if the pitch up problem is solved)
I think this is a very good result for a maiden flight (using only the default tailsitter param setting, no tuning yet)
Thank you for all the developers and contributors!
and for the maiden hover flight (photo and video on my previous reply), here is the log file:
I mount the servos on opposite direction, so for elevator action, both servo pwm output is inverted to one another, and for aileron action, the pwm output is on the same direction
Overall, it fly really good, but sometimes on hover mode, it pitch up uncontrollably (the pitch is uncontrollable, but roll and yaw is ok), luckily the pilot (my friend, not me) is skilled enough to roll the plane and switch to FBWA. At first glance, I think it is caused by wind, but after multiple occurrence on a variety of bearing angle, I’m fairly sure wind is not the cause.
I think it is caused by the thrust line. Because my motor is located under the center of mass of the plane, so it create a pitch up moment. On FBWA, I think this pitch up moment is countered by the elevons and other aerodynamic forces, but on Q_HOVER, I think the forces from the elevons is not strong enough (on the video and log, we can see the elevon is really trying to pitch down).
Based on that reasoning, I think the solution is either move the motor up or tilt it down so the thrust line is coincided with the center of mass.
Is there another solution? or is there another analysis? (can I solve it by increasing the pid value on pitch axis?)
Thanks for the help!
the reason it went backwards is that it was already pitched back by 20 degrees when the transition started. The controller was already trying as hard as it could to hold the nose straight up, but it was failing to do so. So it couldn’t pitch forward, as it didn’t have enough pitch authority in that direction.
It needs more pitch authority, either with larger Q_A_RAT_PIT_* values, or with larger Q_TAILSIT_VHGAIN.
I notice that Q_TAILSIT_VHGAIN is only 0.1, which means it is mostly using the elevons for pitch control. Did you try larger values?
Yes, we come down from 0.8 for Q_TAILSIT_VHGAIN. With such a high value, the plane had fidged and rocked terribly despite far down-regulated Q_A_RAT _ *** _ * Gains. 0.1 is certainly too low. We will try with 0.3 and then optimize the individual PID values for each axis.
The names of the Q_A_RAT_ axes refer to the earthframe or copterframe ?
I’m sorry for the log file, I thought .log is the same with .bin, here is the bin file:
Maiden flight
https://drive.google.com/file/d/0B3BWCAEF49bWempEVWkwcWZDbzQ/view?usp=sharing
Wingborne flight
https://drive.google.com/file/d/0B3BWCAEF49bWNWFyeFNYTWt2YVE/view?usp=sharing Center of Mass 1cm behind normal
https://drive.google.com/file/d/0B3BWCAEF49bWajhXdklpZ0lRZ2c/view?usp=sharing CoM 3cm behind normal
I moved the center of mass backward (hopefully to increase the pitch stability on hover mode), but the pitch up event is still happening.
Thanks for the data.
Nearly the same setup as my Caipirinha.
I had the same effect as Tailsitter (non vectored)
After 3 crashes I changed therefore to the vectored Tailsitter because
I suspected that the effect of the small elevons can not enoughe compensate the pitch.
Especially when descend.
Now the result is good and the frustration gone.
the values of those parameters always refer to the “bi-copter” orientation. So roll is differential thrust on the motors, and yaw is opposite tilting of the motors, to yaw in earth frame.
This time, I’ve tested succesful Mode QLOITER.
And the tuning of the Elevon (Midposition) made that it do no longer turn during
“Standup” from Belly to Sit.
But as you can see between Min.4 and 5 still oscillating but stops itself.
I would appriciate if you could analise the Log. I’m not shure, if to tune Yaw or Roll.
The video shows oscillating Yaw, but the Log Roll
Thanks for helping
Otto https://drive.google.com/file/d/0Bxldq38bfbqHU3Bmb3NLZVNrWDQ/view?usp=sharing