Guys, I have a strange thing with pixhawk 3.4.6. A quad plus config, 3S, mn3110-780, 25A ESC, flies well at the beginning in stabilize. After 2-3 minutes it drops, flips over the front motor. Seems that the front motor or the ESC fails for 1 second. I changed the ESC, did calibration of ESC and the complete pixhawk again and again. All motors turn in correct direction.
No idea where to look at. I have no explanation. The log is here:
https://drive.google.com/drive/folders/0B__cxk5m6S5hNlA2US1hTUZRd0E?usp=sharing
thank you for your help.
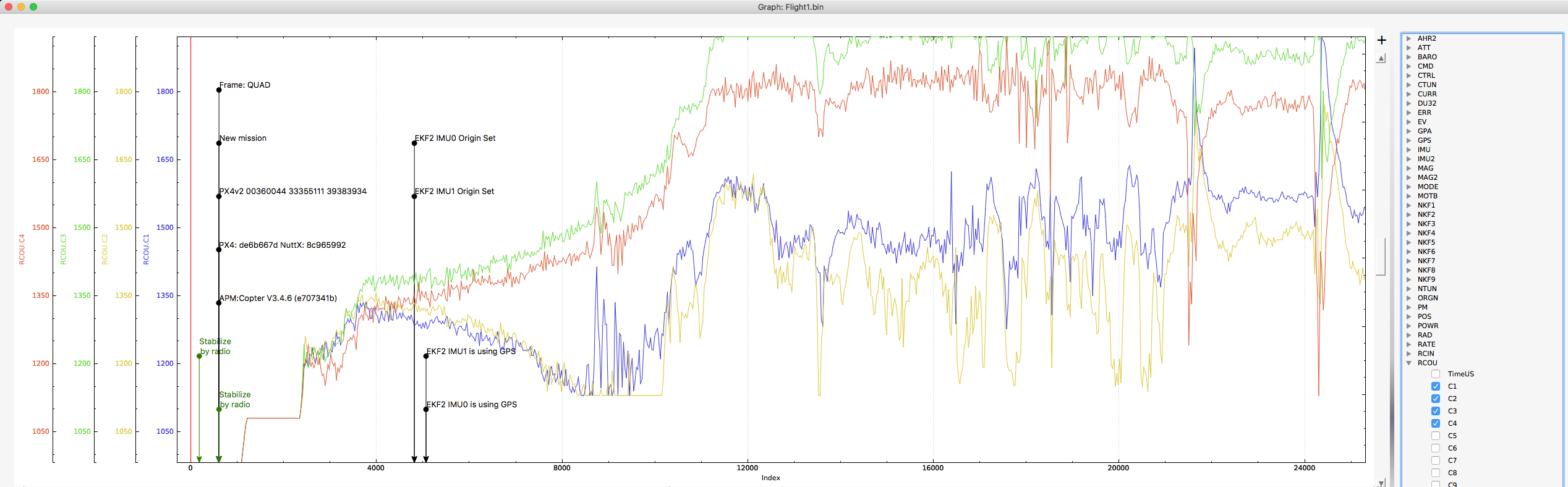
Something is going on. From the start of the flight motor 3 is running higher than the reset. Even motor 4 is running higher which would indicate it’s fighting a Yaw because of a twisted motor mount.
At the end it looks like motor 3 stops because motor 4 goes to minimum to try and keep it upright.
Mike
1 Like
Thank you for that. What would be your suggestion to solve the problem? Timing problem?
I checked because of twisted motor mount. The motors are leveled, the frame is one piece. As such the motors are not mounted twisted.
As @iseries indicated motor 3 is nearly maxed out the whole flight, so it’s not surprising something gave way.
If it’s not a twisted motor then something is creating a yaw problem as 3 and 4 are your clockwise motors and they are working hard to correct something while 1 and 2 cruising along at mid throttle.
It is indicating a hardware or frame problem rather than software IMHO.
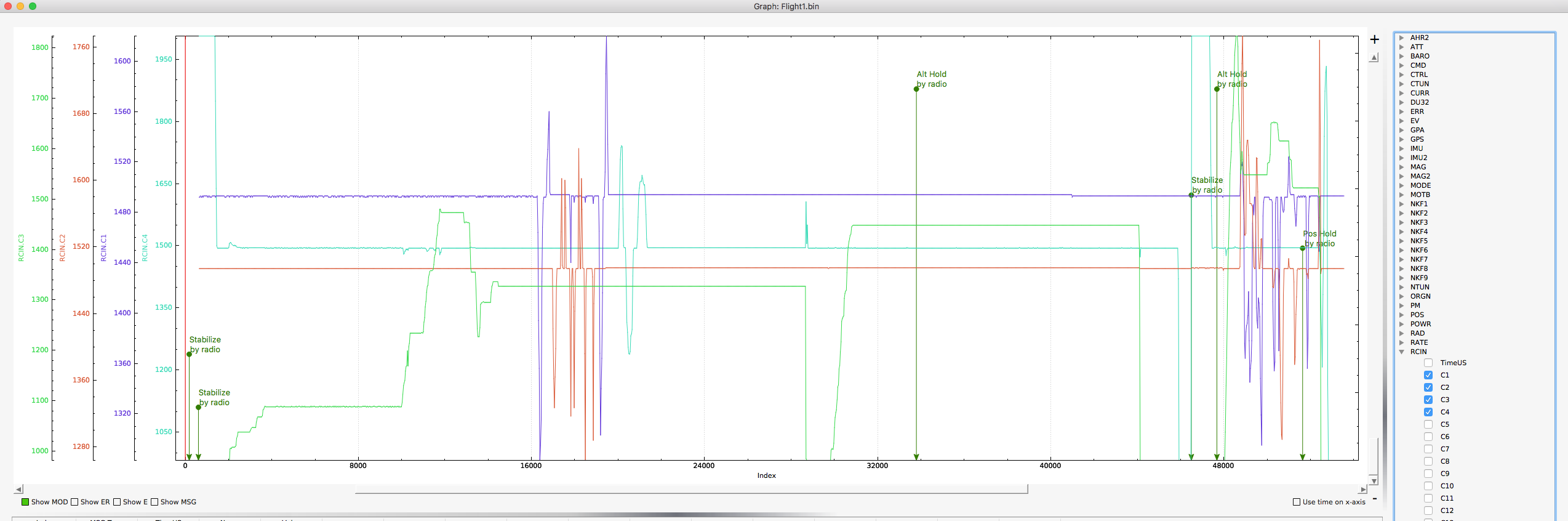
Looking at your RCIN I noticed RC1 and RC2 have low values where I would expect them to be closer to mid (1500)
Do you have any trim set in TX?
1 Like
All trims are set to center. I will resetup the whole story, rebuilding from beginning. Are there some parameters to be set in the settings of the pixhawk?
I will check the RC first if something has changed in the values of the taranis.
Thank you for yourbgreat support.
Note that the firmware will learn the throttle as it takes off. So even though the stick is in the center it does not represent the amount of power being delivered to the motors since the firmware is learning and placing the hover value in the center. This is done so that when you switch flight modes there is no jump in altitude.
Mike
I’m not sure if I understand what you mean. I fly it in stabilize and hold it on a position. I’m flying mode2 with throttle stick down. And suddenly it drops/flips. Even if the firmware is learning the throttle, why does it flip? Should I start it in AltHold?
I checked RC, all parameters are fine, no strange trims or mixes.
And now?
When applying throttle the motor increase in speed and one would think that at middle throttle that 50% power is being applied to the motors but there is a parameter that causes the copter to learn where the copter is level and not moving up or down and set that as the mid point and makes the throttle also at middle even though it may be applying 80% thrust to the copter to get there.
Mike
Ok, so the mid throttle parameter, which was obviously vhanged to the learning parameter could be the reason?
It doesn’t even got the time for learning as at the beginning it ist flying normally but the suddenly drops.
Finally I changed everything another time. Now it works. The reason remains a mistery.