Hello, i have a octo that i set up with the pixhawk2. The rudder is being corrected in the same direction as the spin so my drone just wants to spin on takeoff. Ive built over 30 drones with pixhawk and never seen this issue, anyone seen this issue and possibly have a fix. Reversing rudder doesnt help. Only thing i can come up with is a bad pixhawk itself. Thanks!
I think Pixhawk has equally low thoughts about you. 
Hint you can reverse rudder input and output.
Have you got a log ?
That’s a parameter file not a log.
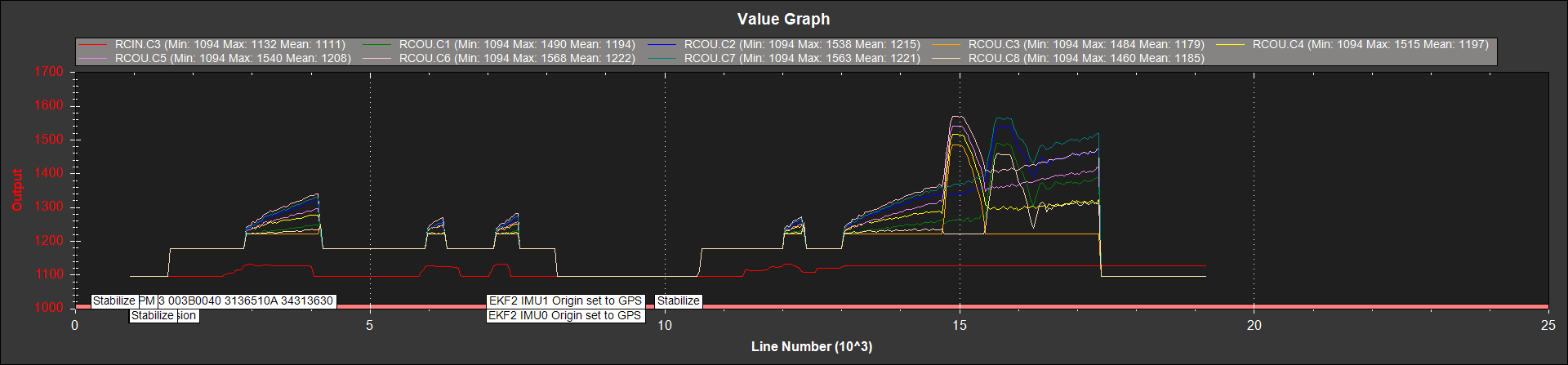
okay so the rpm being a little lower than the rest of the motors is causing my issue.? Is that most likely to be a bad esc then you think? what are your thoughts on that.
Thanks man i really appreciate your help!
i found the problem…and i feel real stupid now. This is the first octo/pixhawk combo i have built, i acctidenlty followed the motor layout of a hexa and the octo is like the exact opposite… thanks for everyones help!
Well done.It can take quite a bit of brain excercise to figure something like that out.Once you’ve set it up and checked it’s ok it’s very hard to even think you may have made an error.I often rip it all apart and start from scratch to find a problem.
Only another 765 parameters left to learn. 
Hahahahaha Yah ive been there man holy crap, having to tear down a fresh build to find out its just one small error throwing everything off. We gotta get this unit out to MIT by the end of this month so im pretty happy its fixed. Thanks for your help jagger. 