Hi,
had a strange occurance yesterday, my copter “landed” during the mission because it switched back to stabilize mode some time after switichng to rc failsafe (continue mission in auto mode). Shortly after landing it recovered and continued withe the mission.
It sounds like you have your RC receiver’s lost connection failsafe configured wrong. Your RC receiver needs to be set such that the throttle (Ch3) goes low to about 925 and all the other channels remain unchanged. It sounds like it is dropping the flight mode channel (5) instead of the throttle channel (3).
I have seen this happen. I had my radio on and switched it off causing the failsafe condition. Then I turned it back on which causes some other issues such as all the values dropping as the radio starts back up. This includes change the flight mode back to Stabilize and then back to Auto…
Yes, if the RC receiver was configured wrong, it should indeed happen any and all times you lost connection. That said, I don’t see any way that Arducopter would do that on it’s own. I would lean towards a malfunction in the RC receiver still.
But how should the receiver be configured wrong if the problem only occured once during at least 25 rc fail safe events?
And there are not that many options to configure the receiver as far as i know?! Or do I have to configure the transmitter as well? But anyhow, it only happend once in at least 25 times… .
On my receiver it set to alarm if any of the switches are not in there lower positions. So if the radio is turned off and then back on the receiver comes up in error mode which tells the Receiver to go to zeros. This indeed causes a failsafe but because the channel went from 950 failsafe value to 0 the copter responds by switching to Stabilize on channel 5.
I have not tried this lately with the current build as it causes a crash so I have not tested this in a while.
I think the Taranis/Open TX has a very good solution for that problem, you can configure warnings but you can always skip them. But again, I never turned my receiver off wenn the copter was in the air.
I’m not suggesting your receiver is configured wrong since you say it’s worked properly for all the other time it’s gone into failsafe. What I’m suggesting is that it malfunctioned.
Oh, sorry, thank you for the hint! That would be quite bad.
But now I realize that you are right, but its the transmitter. I now remember a problem with my other copter and another receiver wich might be related.
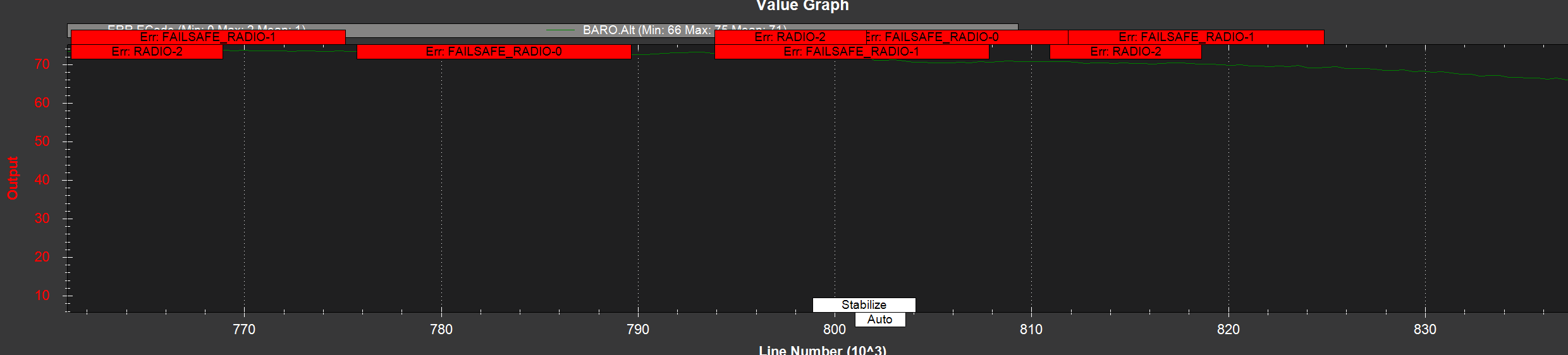
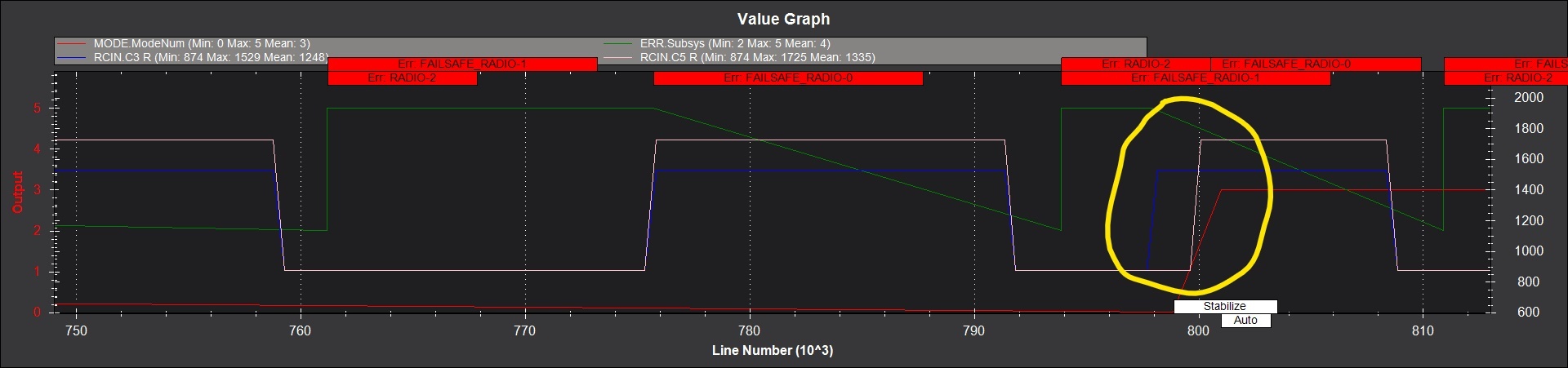
I’ve looked at your log. It’s pretty clear what happened:
you have your receiver configured to send different values when connection is lost and that means your channel 5 (the mode switch) is changed to 874 at that time; same happens with channel 3 (throttle) which fires the radio failsafe
you have multiple occasions where the values sent by your receiver show that it lost connection with your radio
on almost all occasions the values return to their previous values when radio connection is restored; on one occasion though, the throttle value has gone up to the previous value (which cleared the failsafe) but your mode switch value didn’t do it immediately - as you can see in the picture below. I’m not sure if this was a problem with your receiver or you did have your mode switch in Stabilize, but this is why the mode changed, it was commanded by your radio receiver after the connection was restored.
The receiver you said you have has the option to stop sending any value when connection is lost and that’s the recommended method to use. I would change to it.
Dear @OXINARF, thank you very much for your help!
I donated 15$ to the outstanding Ardupilot project as a kind of thank you (I know that’s only a small number compared to the great work but unfortunatly I’m not able to give the adequate amount…).
That’s strange, I think. I’m pretty sure that if no pulses are received it would stay with the latest values, but I might be wrong - I don’t have hardware to test that right now unfortunately.
You should not have the receiver go dead in a failsafe. Roll, pitch, and yaw should either remain unchanged or go neutral (preferably neutral). Flight mode should stay where it is. And throttle should go low. I always have mine bring the gimbal to about 45 degrees too.
@Pedals2Paddles: as @OXINARF wrote and as it is written in the documents the “No Signal”-method is the prefered method:
“No Signal” method - the receiver stops sending signals to the flight controller. This is the preferred method and is how most modern FrSky receivers operate.
Well ok then. I’ve never owned a receiver where no signal on any channel was an option. Never even knew that was an option. I probably skipped right past it when educating myself on the failsafes a few years back.