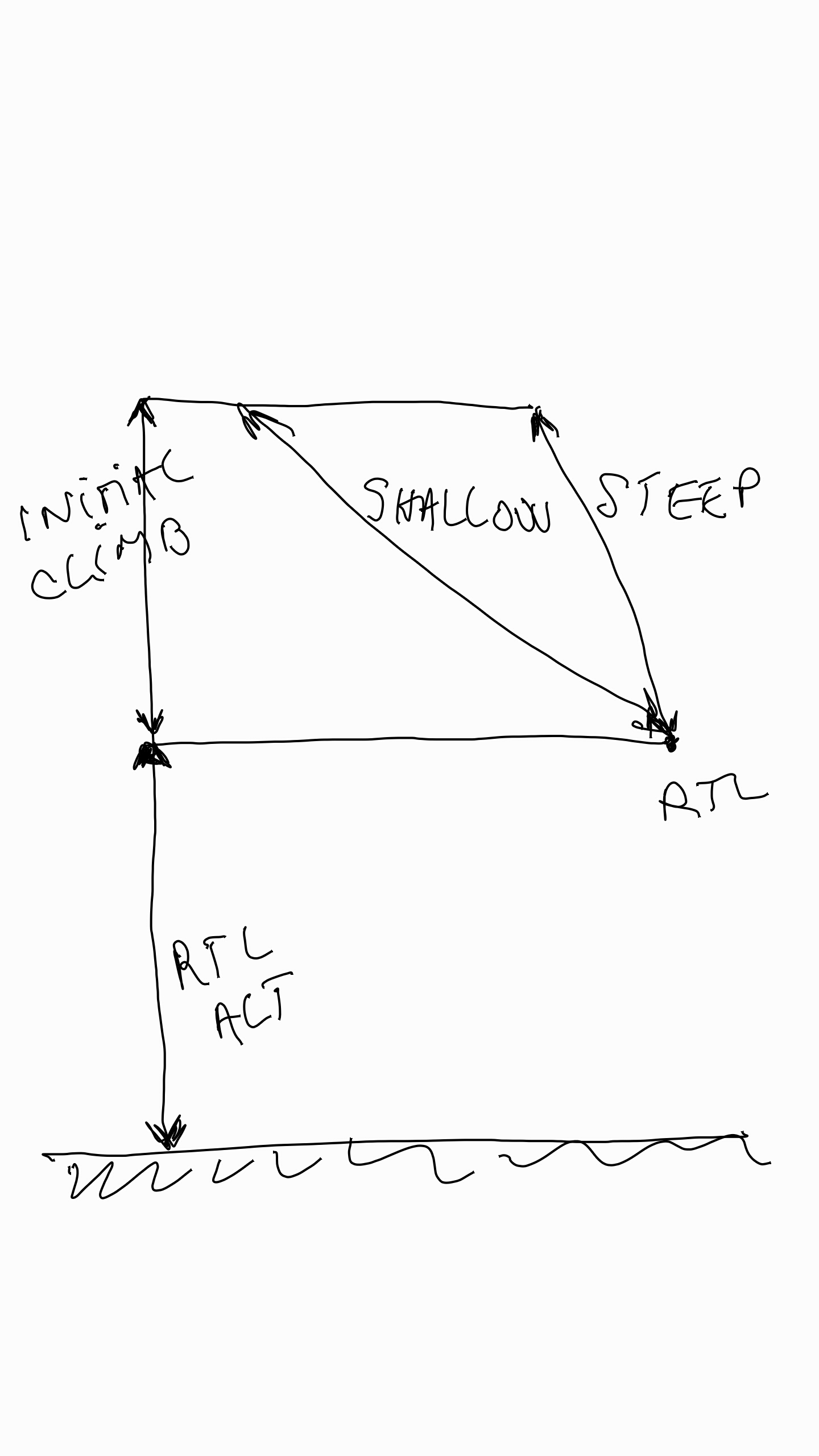
From this image i understand that A is initial climb altitude , what is B ? No matter who is B , if initial climb is set 0, 0:B=0. I asume that cone has a predifined angle “shallow” “steep” … if rtl_min_climb is set 0 no matter the cone altitude above rtl should be 0 therfore original rtl altitude.
One important thing is that i was at 57m altitude when triggered rtl and rtl_alt was set at 35 m. If you check the log you will see that copter climbed at 92m before starting descent. Is it posible that rtl_alt and initial climb param are mixed up ?
Jack, I’m sorry but the image seem to bring more confusion than help. A and B are defined together with RTL_CONE_SLOPE. So if:
RTL_CONE_SLOPE is 3
you are 25m away from home (B)
then the cone limit will be at an altitude of 75m (A).
RTL_MIN_CLIMB should mean that it will climb, at least, that altitude - or until it reaches the cone limit.
RTL_ALT should be the maximum altitude it will climb to - respecting RTL_MIN_CLIMB though.
There’s also a minimum climb of 2.5m and we don’t descent from current altitude.
Everything is possible While I haven’t looked at your log, some questions:
You got me interested so I just looked at your log. The climb you see was done during loiter, not RTL. RTL was activated at home and it didn’t climb at all.
I gave it a second look as i did not remember switching to loiter. Ch3 was forgotten about middle since take of. High throttle cancel landing was set. Appears to me that when auto mission was finished, because of higher value on ch3 copter switched to loiter. Isn`t high throttle supposed to cancel only landing why switching to loiter ?

 i’ll plot it and do further testing. Thanks for your pacience!
i’ll plot it and do further testing. Thanks for your pacience!