We’d like to announce the latest release of our imagery code (also known as the CUAV Tools). This is the software we’ve used to successfully find Joe at the 2012, 2014 and 2016 UAV Challenges
Significant work has gone into documenting the usage of the Tools, in addition to GUIs and Windows compatibility - making it much easier for new people to get started with the tools.
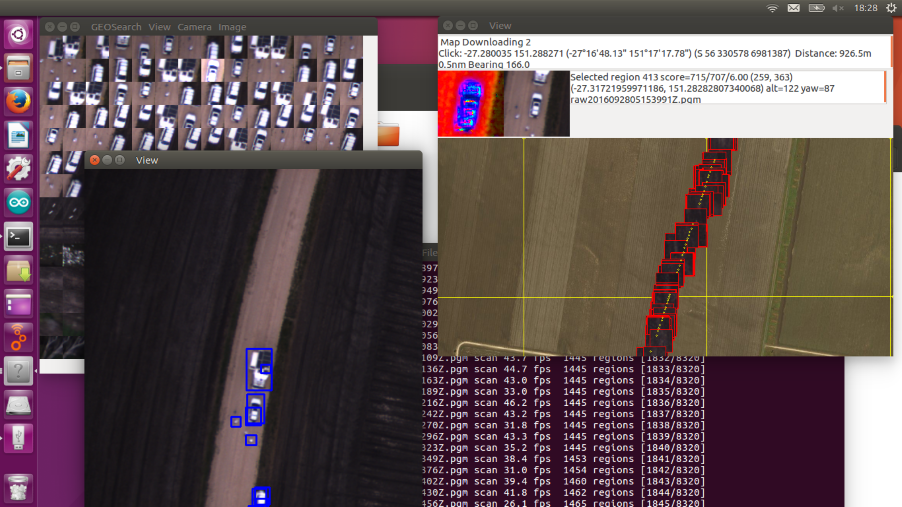
The Tools are designed to efficiently run through a large dataset of images and identify any unusual or interesting objects. These objects are then geolocated via an associated tlog file or the Exif positioning data within the images.
Finally, I’d like to thank all of our Patreons (https://www.patreon.com/canberrauav), whose generosity continues to make this development possible!
This is real excellent news. I’m planning on using these tools in the upcoming Japan Innovation Challenge (rules are here but only in japanese), Of course I’ll be contributing back any fixes/improvements I can make on what looks like an amazing system.
Stephen quick question:
In order to run geosearch using a selected folder with geo-referenced photos, what file type must the photo be and how is the photo EXIF meant to be formatted for position (in particular for GPS/alt/heading)? Maybe a quick guide to show how to use the CUAV image folders would help to test? Thank you.
As per the EXIV guidelines (http://www.exiv2.org/tags.html). At a minimum, geosearch requires Exif.GPSInfo.GPS.LatitudeRef, Exif.GPSInfo.GPS.LongitudeRef, Exif.GPSInfo.GPS.Latitude, Exif.GPSInfo.GPS.Longitude.