Yesterday I flew for the first time my two years old 450 Quad with FW 3.4.6 (upgraded from 3.3.3)
It was also my second attempt to fly a mission.
The first battery all went smooth. The Quad copter flew very nice in Stabilize and PosHold. There was almost no wind.
Crash
With the second battery I took off, in Stab mode, and switched to PosHold mode.
Before launch, I created a mission (apmplanner2) with 3 Way points, about 30-60 meters away.
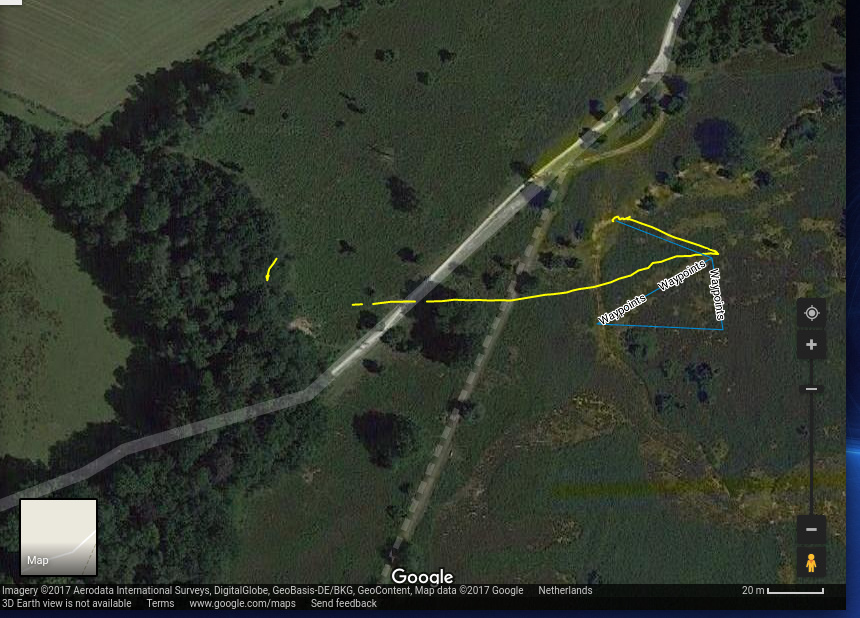
I switched to auto, and the copter flew to WP1, it reached it, turned (Yaw) in the direction of about WP2 and then flew away. (See picture (via export KML-file))
It crashed in a bush of 20 meters tall trees. I was lucky that the copter fell through the branches on the ground. Severe damage (broken frame plates, broken GPS mount, broken camera housing and I lost three antennas (RC radio, telemetry radio))
Looking at the dataflash log I cannot find any direct clue. No high vibration values.
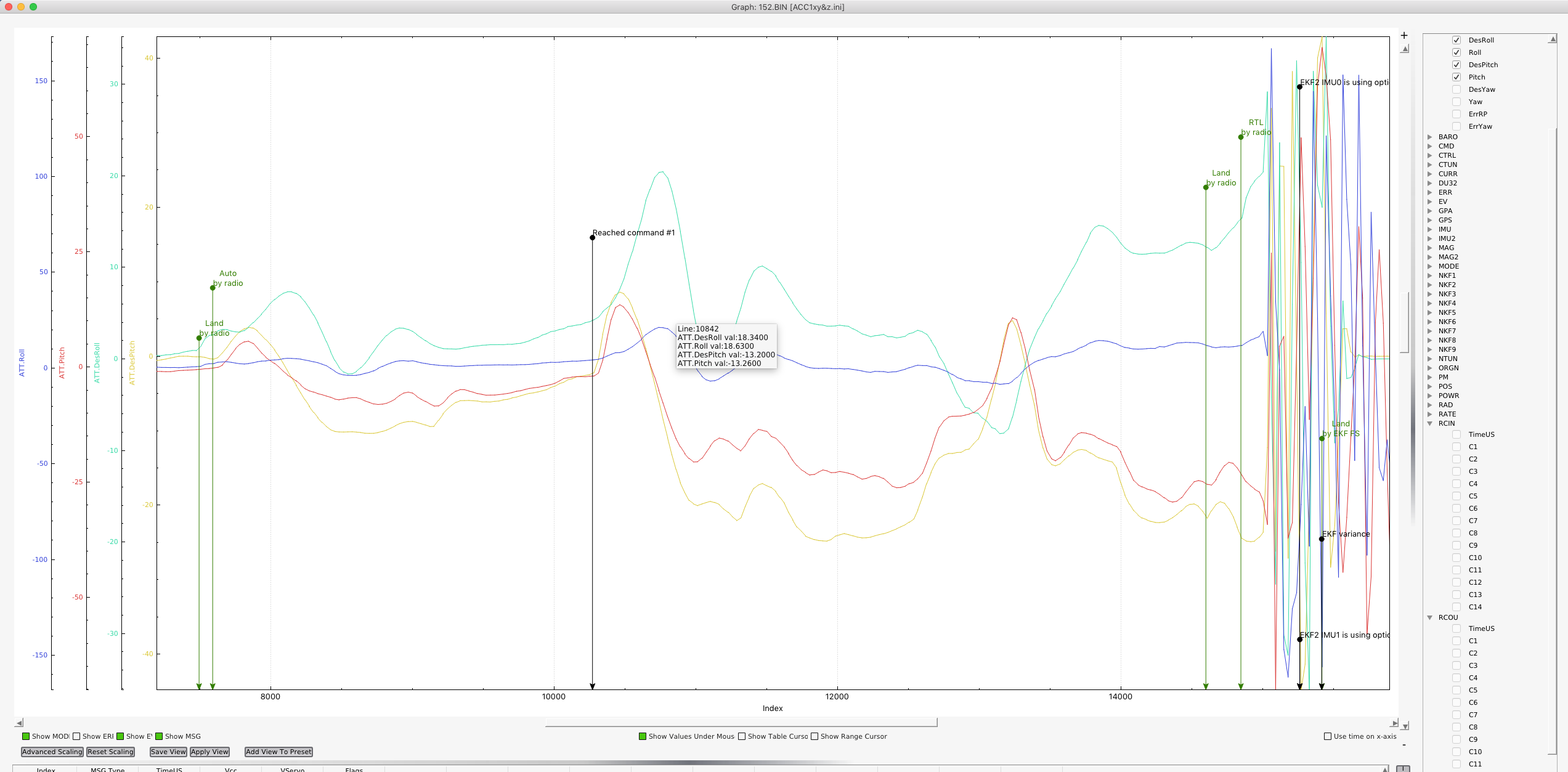
Even the designated Roll/Pitch/Yaw values are in line with Roll/Pitch/Yaw.
The only thing I See are high EKF variance values, especially for the magnetometer (NKF4/9.SM) and after reaching WP1 high velocity (NKF4/9.SV) values.
But there is no EKF Variance Error warning and both Compasses follow each other close (In my opinion)
Could the compass be the reason? And why?
From the beginning I experience a lot of magnetometer problems with this quad-copter. With FW 3.3.3 I experienced probably the same error (missing a WP and a flyaway) but then a EKF fail-save saved my Quad-copter. I hoped a FW upgrade from 3.3.3 to 4.3.6 could fix this problem.
Hopefully someone can give me a hint for further investigation and trouble shooting. Perhaps a parameter that I changed in the past by accident?
Thanks,
Roel
Quadcopter, TRIQ450, (OpenSource design) with Clean and Dirty frame sections.
FlightController AUAVX2, Ublox M8 GPS module with magnetometer.
Thanks Dave and Mike (@dkemxr, @mboland) for you time to look at this log.
I see what you mean that the Nsats goes to zero at about 640 seconds. But that is at the moment the quad already crashed in the tree and tumbled down to the ground and the GPS receiver stand broke off.
There is also a little dip in Nsats (621 seconds, 10 Sats) but that was just before reaching WP1. The problem occurs after reaching WP1. Then it looks like the quad is heading to some faraway waypoint.
I also observed that although the WPNAV_SPEED was set to default (500=5m/s, (18Km/h)) At the moment of the crash the speed was 52Km/h (14m/s)
Hi All,
I am sorry to bother you with my problem again. Thanks for those who already took some time to look at my problem. I hope some developer (@rmackay9 ? ) can have al look at the logfile. I don’t trust my hardware setup anymore. I am desperate.
Is it a firmware problem? Is it a hardware problem (FC, GPS, Compass etc.)? Something else?
Why was my quad flying the wrong direction, and towards which point? Why was the velocity so extremely high before the quadcopter hit the tree?
So I would guess that your copter is either over weight or under powered (same thing really).
It just didn’t have enough power to follow commands and had to fight to stay stable, hence the fly away.
Thanks Mike for your explanation.
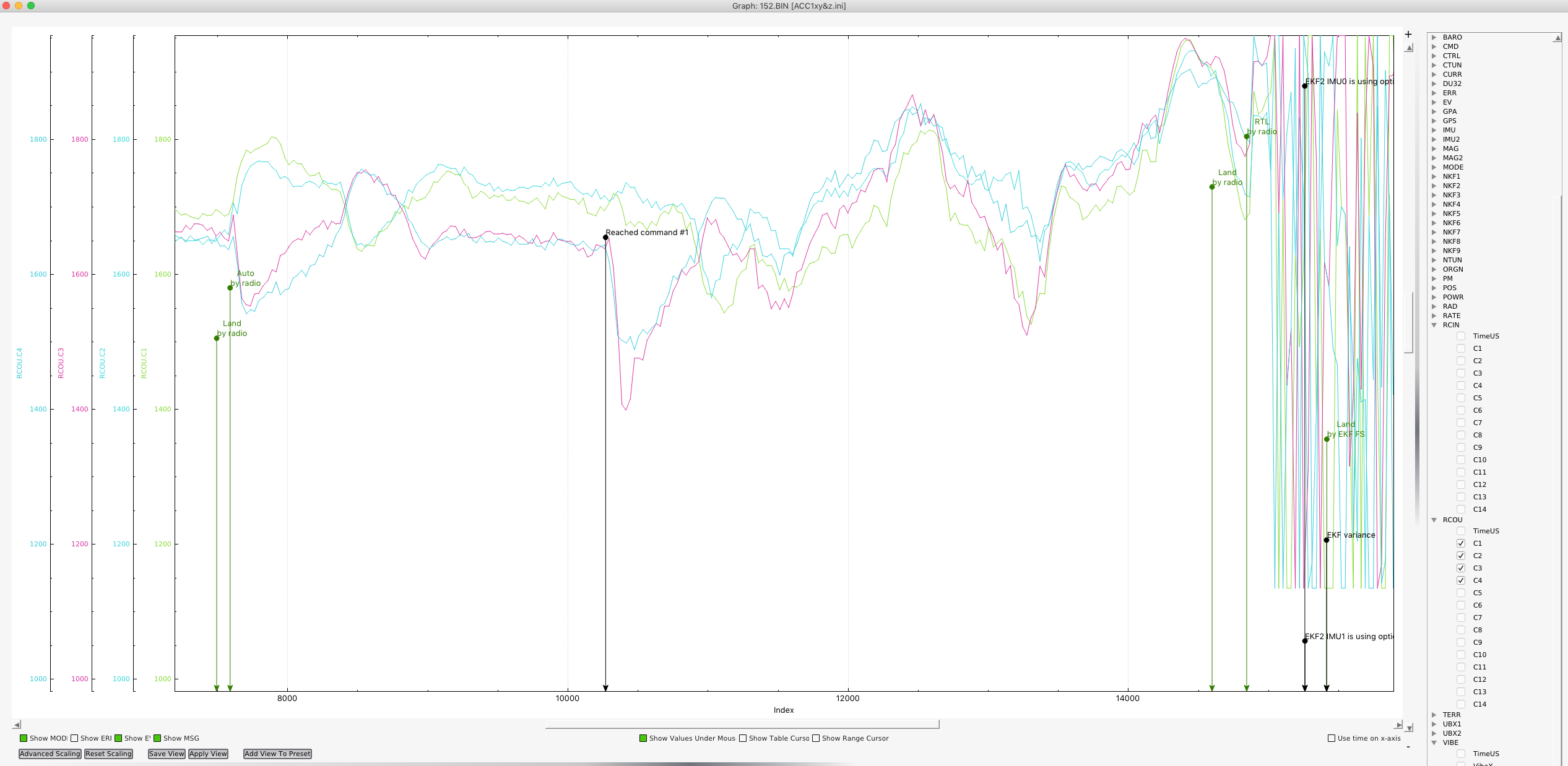
Although I don’t understand what you mean by nearly full throttle. Before I switched to AUTO the hover throttle wat between 1600-1650. After switching to AUTO en before reaching WP1, the throttle is not over 1750, while the quad was speeding up to 5 m/s(18 km/h).
After reaching WP1 the quad was speeding forward up to 52 km/h with at the end motor throttle values of about 1950 (and not clipping) when the quad was flying too fast and fighting the air resistance.
So, in my humble opinion, there was plenty enough power.
But correct me if I am wrong. But I think something else went wrong…