I have taken the following pictures of what happens:
RCMAP params are at default values:
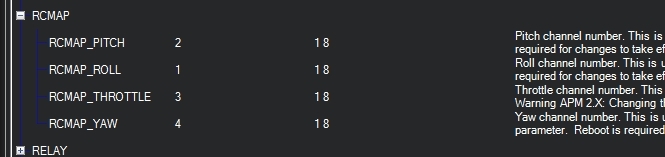
Skid steer param is set to one (tank style vehicle):

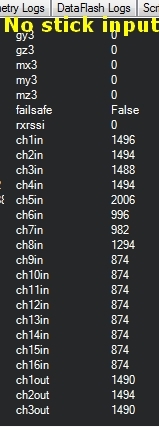
With no stick input I get the following IN /OUT channels on mission planner status screen:
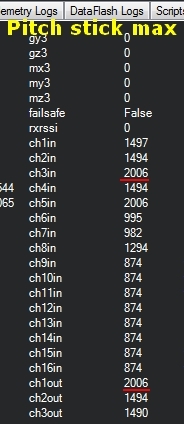
With full pitch (throttle input), I get a correct Ch3In at max, but I only get Ch1Out to increase. Ch3Out remains at neutral:
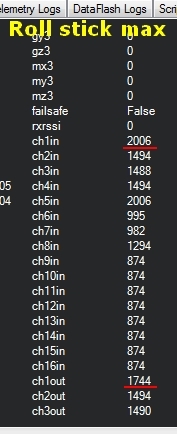
With full roll (steering input), I get a correct Ch1In at max, but I only get Ch1Out to increase. Ch3Out remains at neutral:
Is skid steering broken in the lateste Ardurover release then or do I do something wrong still in the parameters ? (param file attached)HugRover.param (7.5 KB)
Thx for your help