Ok I try to clear the eeprom and MP and start all over.
And… the results is the same.
The motors reached it’s full throttle at 2-3 clicks on the throttle stick and it’s very slowly.
IMPORTANT NOTE
I use the Racerstar BLheli 4X20A V2 ESC calibrated with BLhelisuite.
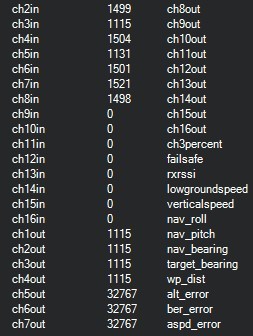
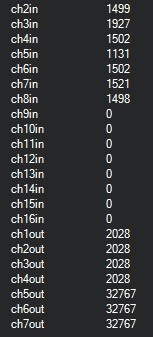
I managed to extract the parameters.The only thing I can see is that the throttle trim is @ 1500.It should be the same as the lower limit of the throttle.You have 1115 min - 1500 trim - and 1934 max.That’s just not right as you don’t have a centre sprung throttle.
Without logs we need visuals.So if you can video the screen while doing a radio calibration it would (may ) help.
Also,you have great compass offsets so turn off compass learn.