Yes, drone is leveled.
Ruben , please watch the video on the first post, you will see that regardless how much throttle I give, it doesn’t respond.
If I give 5% throttle, motors spin at 1500, if I give 30% throttle, motors spin at 1500, if I give 100%, they also spin at the same speed, 1500.
So, is not about ESC calibration compass or level.
So - normally - in stabilize mode, the motors would already spin. If you arm your drone, it starts spinning. That is the default behavior. That doesn’t happen in your video but i do think i see it in the latest log.
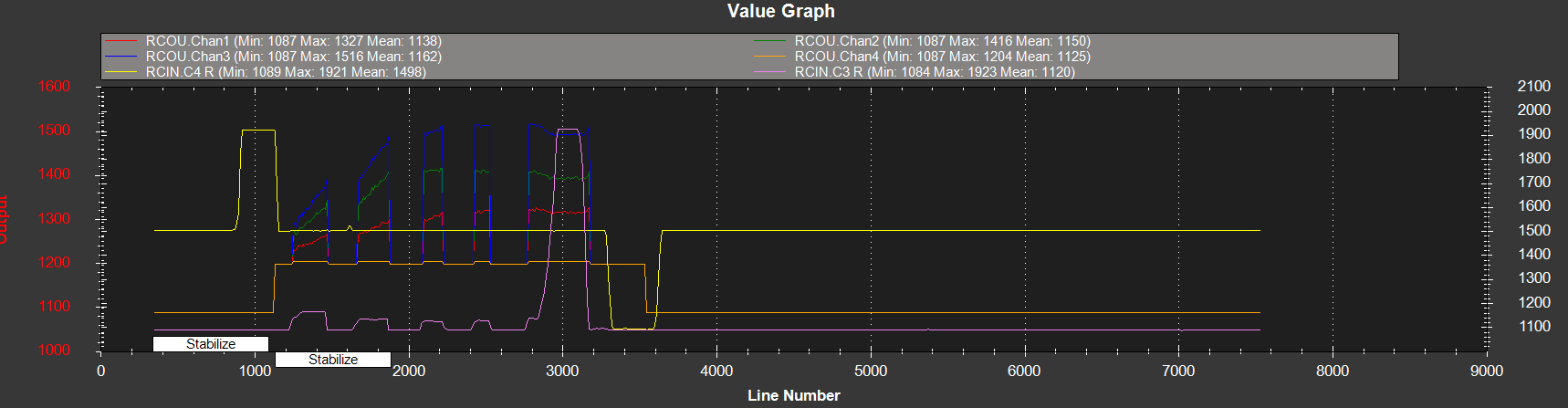
You can see that you arm, and then the dark yellow line is your ‘base’ spinning - this it does not do on the video for some reason. Has this changed?
Then, i can see you push the throttle up a little (purple line at bottom). The drone responds with difffernt motor outputs to the different sides, so that’s why i think it’s unbalanced.
However, looked at your Roll/pitch/yaw and these seem to be normal. Your Yaw moves a bit, so i think this is just your drone fibrating and moving around (ever seen a phone fibrate of the table?). The roll/Pitch do seem to make a strange curve right at the beginning. Not sure if that’s because you plug in the battery?
Ruben, the video was done before this flight, but it shows the behavior.
Motors are not respecting the throttle. Not sure why you add RCIN CH4 on the graph as it doesn’t give any additional information.
What matters here is:
RCIN CH3 -> My throttle (PINK)
RCOU 1, 2, 3, 4 -> ESCs (BLUE, GREEN, RED, ORANGE)
On this log I gave throttle 5 times, the first 4, were really low %, like 5%, (1100 on the graph).
But motors are STILL going a t about 50%, not linearly is something like (ON/OFF) not proportional.
At the end I give full throttle, and again, motors spin at about 50%, not respecting the command again.
So regardless how much throttle I give, it will do the same.
The reason i added RCIN RC4 is to see when you armed and disarmed the drone.
I agree with what you’re saying and i understand that the video is the result. I think (and i’m not sure!) that your ESC are not setup properly or that there is something wrong with the balance. As i said, you can see one motor not giving a lot of output while the other 3 are doing more, and not equal amounts of output.
I don’t know enough to help you further, but maybe somebody else can help!
Ruben, I bought different ESCs just in case, I’ll install them tonight and do the calibration again, maybe a recorded video on the calibration process may help to see if there is any gap on the process right ?
I got your point about CH4 and makes sense !
Thanks for trying to help, this is driving me mad already, I’m almost 4 days trying wit no success to make it work.