I performed autotune for the first time in my 450 quad. I flew it around in stabilize mode and it appeared to fly much smoother than the default PIDs, so I accepted the tune. However, I found that when landing in Loiter mode, the quad started to rock uncontrollably on the pitch axis. Switching back to stabilize would bring things back to normal. I just assumed it must have been fighting the wind and thought nothing of it. However, the next time I flew it there was no wind and the same behavior occurred.
My assumption was that some PID settings for the Pitch axis must have been too aggressive and it was trying to over correct… however when I did a diff of my parameters before hand, the PID values were actually much lower… so I’m a little bit confused.
I might try to repeat the autotune, but I am wondering if anyone has suggestions on what I could try tweaking manually, as aside from the behavior I’m fairly happy with how it flies. I attached my parameters, in case someone can easily spot something not looking right.
Hi @metalpiotr,
You may try to do in-hand pid tuning, as described here: http://diydrones.com/forum/topics/arducopter-tuning-guide
Personally I like this more than auto tune, although I had good results with that before.
Can you please post your logs? My eyes aren’t trained to spot errors, but without that its hard to guess.
Your Roll/pitch tuning values are almost the same. Do you have a symmetric copter?
I had some scary pitch movements some time ago when loiter tried to break, with a too high max-pitch angle or a too high center of gravity. But those may be solved with PID tuning. Im not sure.
Thanks Marcell. I will consider the in-hand approach, although I admit it does look a bit intimidating.
The quad is symmetric in terms of being an X frame (Q450), but it is a bit front heavy. I have moved my gimbal with camera to the front as I was getting props too often in the frame. I also performed the autotune with the gimbal and camera on the frame… with the gimbal being plugged in (I know people have different opinions on this).
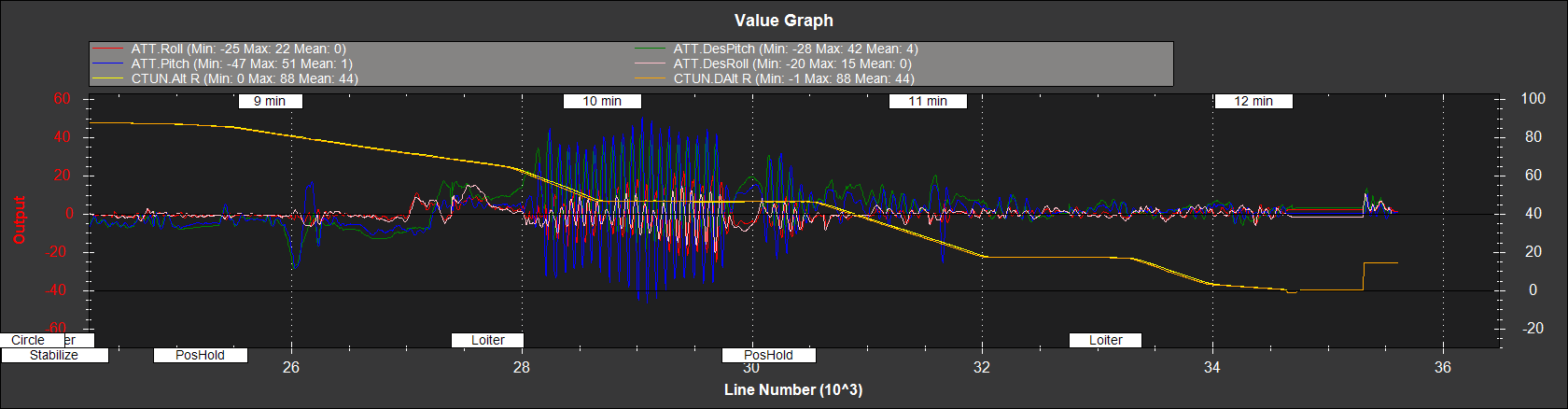
Here is the link to the logs of a flight this occurred in:
The rocking started to occur when I started lowering in Loiter mode near the end of the flight.