When enabling EK3 there’s this prearm check that not allow to start.
With EK2 no issue.
When enabling EK3 there’s this prearm check that not allow to start.
With EK2 no issue.
If you don’t have a GPS fix, but you have a radius or polygon geofence set, you get that message. It’s not a EKF2 vs EKF3 thing.
Not is not the issue.
It seems that AC3.5 RC8 prearm check are not linked with EK3.
So if you disable EK2 and you enable only EK3, prearm check cannot pass.
Not the case. You can run EKF2, or EKF3 or both at the same time. In all three cases, it works as intended. If you’re getting that pre-arm failure, it’s because your GPS position is no good, and you have fence enabled.
I’m not ok is not true. Please make test and report.
Only ek3 with pream activated.
With ek2 ok
With ek3 impossible to arm with prearm activated
I’ve been flying with the EKF3 now and then and I’m pretty sure it’s working ok. My guess is that on your vehicle, the EKF3 hasn’t been enabled properly. I’ve written a wiki page here: http://ardupilot.org/copter/docs/common-apm-navigation-extended-kalman-filter-overview.html
In particular, perhaps you haven’t set the AHRS_EKF_TYPE to 3? Or perhaps the EK3_ENABLE hasn’t been set?
I’ve used it as well and it arms the same as it does using EKF2. EK3_ENABLE needs to be 1 to enable it to begin with. And AHRS_EKF_TYPE needs to be 3 to make it the active EKF.
The prearm check for the geofence does not care what EKF you’re using. If you have a geofence enabled, and it doesn’t have a usable GPS fix, it will not arm and you get that error. The behaviors is the same in EKF2 and EKF3.
Now, many have noticed that EKF3 is more picky about a usable GPS fix, and can take longer getting one. So I would suggest the problem you’re having isn’t with the prearm check or geofence. It’s more likely that EKF3 is rejecting your GPS due to drift or some other hardware related complaint. The geofence happens to be the first line of defense telling you something is wrong. I bet if you turned off the geofence, it would still be a problem because you still have no usable GPS fix. Can you copy and paste or screenshot the messages you’re getting from Mission Planner? Or post a t-log and dataflash log?
Ok, Is that , thank you, I don’t activated AHRS EKF TYPE to 3…
Sorry.
I realize this is an old thread, apologies, but I am seeing this issue on version copter 4.2.1-official. The error is “PreArm: fence requires position”, but I have no fences set up. The mission shows zero fence data, and the GPS has a relatively stable lock on 8-9 sats. Same issue for EKF2 and EKF3.
Here’s what the Messages tab shows:
6/7/2022 9:10:23 PM : PreArm: Fence requires position
6/7/2022 9:10:23 PM : PreArm: GPS: waiting for home
6/7/2022 9:10:05 PM : Frame: QUAD/X
6/7/2022 9:10:05 PM : IMU0: fast sampling enabled 8.0kHz/2.0kHz
6/7/2022 9:10:05 PM : RCOut: DS600:1-4 PWM:5-8 NeoP:9
6/7/2022 9:10:05 PM : KakuteH7 001B0034 31315113 38363233
6/7/2022 9:10:04 PM : ChibiOS: 93e6e03d
6/7/2022 9:10:04 PM : ArduCopter V4.2.1 (c8b6b674)
6/7/2022 9:10:01 PM : u-blox 1 HW: 00080000 SW: ROM CORE 3.01 (107888)
6/7/2022 9:09:58 PM : GPS: u-blox 1 saving config
6/7/2022 9:09:51 PM : ELRS: RF Mode 7, telemetry rate is 4Hz
6/7/2022 9:09:48 PM : Frame: QUAD/X
6/7/2022 9:09:48 PM : IMU0: fast sampling enabled 8.0kHz/2.0kHz
6/7/2022 9:09:48 PM : RCOut: DS600:1-4 PWM:5-8 NeoP:9
6/7/2022 9:09:48 PM : KakuteH7 001B0034 31315113 38363233
6/7/2022 9:09:48 PM : ChibiOS: 93e6e03d
6/7/2022 9:09:48 PM : ArduCopter V4.2.1 (c8b6b674)
6/7/2022 9:09:48 PM : Frame: QUAD/X
6/7/2022 9:09:48 PM : IMU0: fast sampling enabled 8.0kHz/2.0kHz
6/7/2022 9:09:48 PM : RCOut: DS600:1-4 PWM:5-8 NeoP:9
6/7/2022 9:09:48 PM : KakuteH7 001B0034 31315113 38363233
6/7/2022 9:09:48 PM : ChibiOS: 93e6e03d
6/7/2022 9:09:48 PM : ArduCopter V4.2.1 (c8b6b674)
6/7/2022 9:09:48 PM : Frame: QUAD/X
6/7/2022 9:09:48 PM : IMU0: fast sampling enabled 8.0kHz/2.0kHz
6/7/2022 9:09:48 PM : RCOut: DS600:1-4 PWM:5-8 NeoP:9
6/7/2022 9:09:48 PM : KakuteH7 001B0034 31315113 38363233
6/7/2022 9:09:48 PM : ChibiOS: 93e6e03d
6/7/2022 9:09:48 PM : ArduCopter V4.2.1 (c8b6b674)
6/7/2022 9:09:45 PM : ELRS: RF Mode 7, telemetry rate is 32Hz
6/7/2022 9:09:44 PM : GPS 1: detected as u-blox at 230400 baud
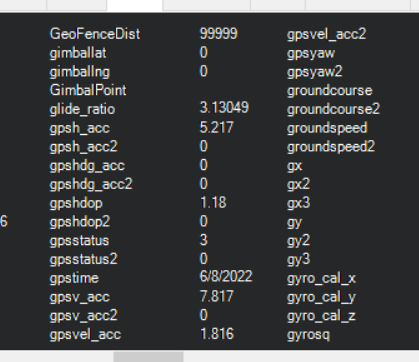
And the GPS status:
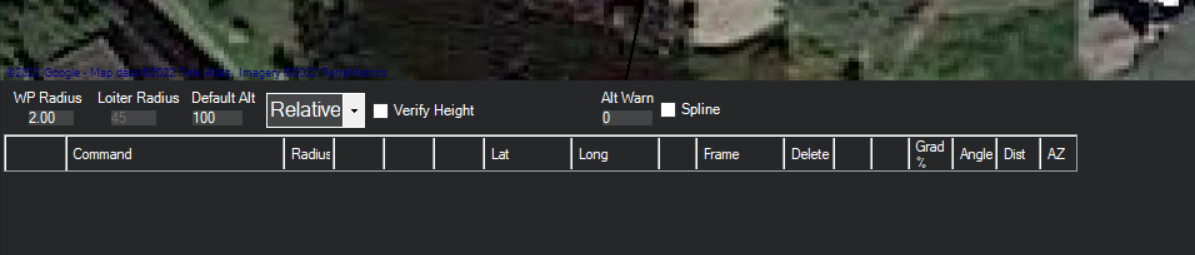
The fence data is null:
I just did a clean install of 4.2.0 and got this message as well. As I hadn’t set the fence and my fence data was also null it took me a while to find that under Full Parameter list Fence_Enable was set to 1 Enabled. Setting to 0 solved the problem for me.
Thanks @ausphoto . Does this also mean that after setting FENCE_ENABLE=0 I will no longer be able to define fences via Mission Planner?
Try setting FENCE_ENABLE=1 and set a fence distance and or polygon. I must have enabled FENCE_ENABLE=1 and then didn’t set any further fence details. So maybe because of the incomplete setup the error message appeared.