Hello, I´ve just flew my hexacopter with the new 3.4 beta version. I could notice that something was going on with altitude controller. In medium alt, around 2 to 4 meters the drone was struggling to maintain the altitude. It was difficult to land, because it was always overreacting to my commands. I havent touch a single parameter since the upgrade from 3.3.
I have an analog rangefinder , which I had to parse the values manually , since after the upgrade they were not there.
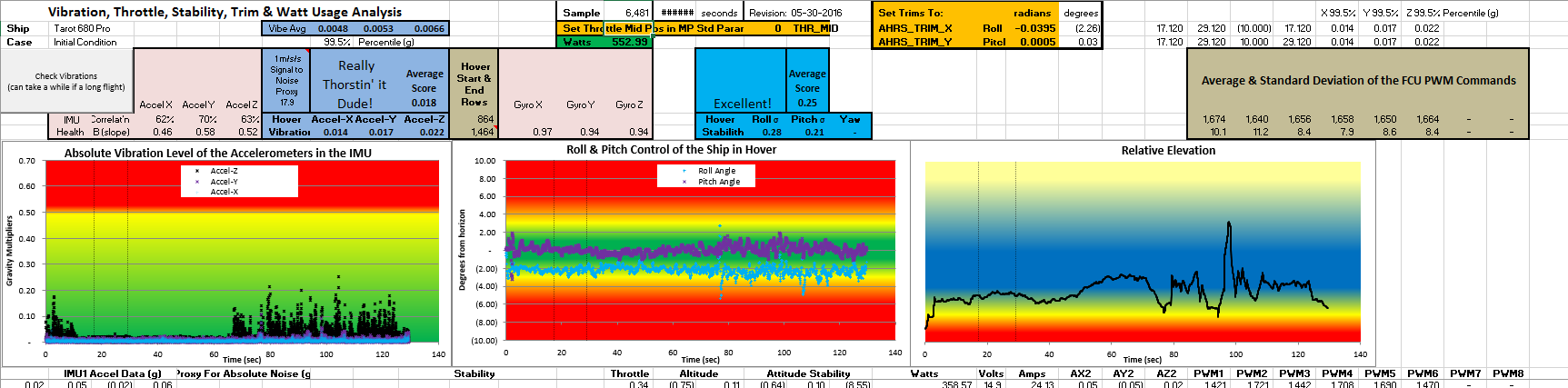
Today there were no wind at all, i was trying to get n two minute hover to analyze vibrations , but was almost unable to. At high altitude ( + 15 m ) and very low (1m) it wasn´t bumping. Ive also made a video , will post shortly. Sorry that was night and don´t know if it was good.
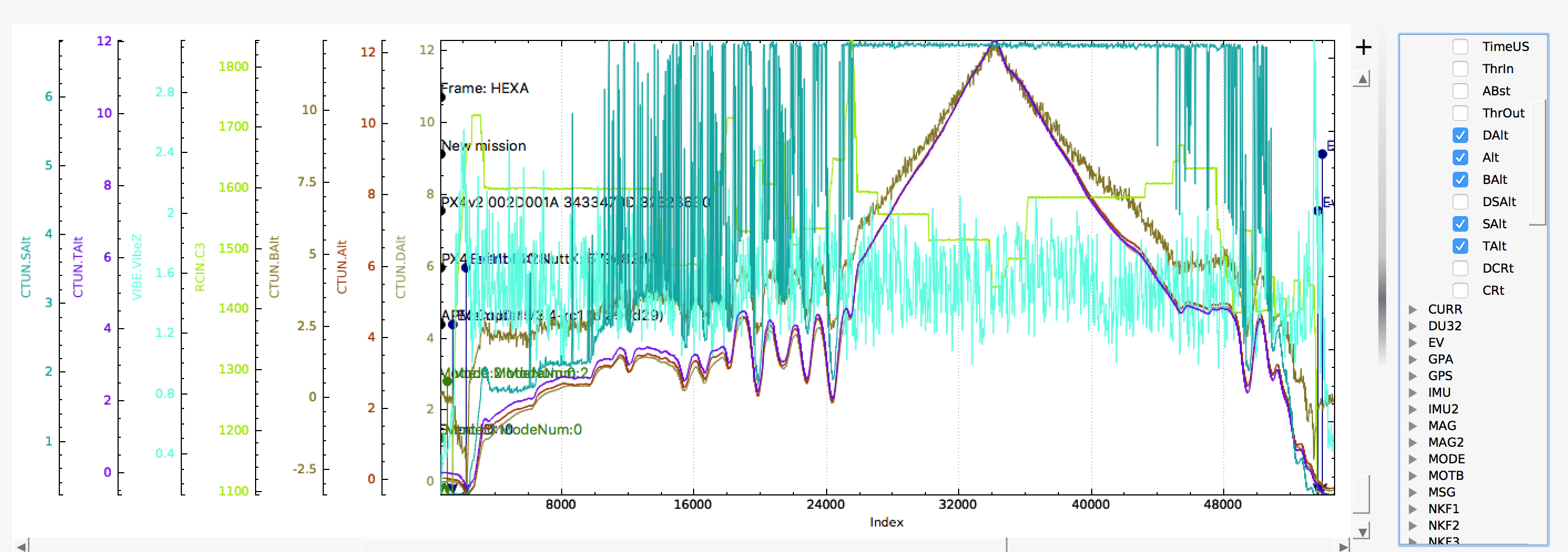
Could someone please look at the logfiles to see if I need to have something changed to get the perfect behavior that I used to have?1 5-31-2016 7-04-32 PM.zip (998.3 KB)
The hopping might be influenced by your analog rangefinder that you can see on the darker green plot is absolutely nuts when you describe (haven’t seen the video) and goes quieter when flying higher (perhaps out of range?)
Otherwise it seems to follow the commanded height variations very closely. Vibrations (z) are a bit higher than I like to see but remain constant throughout the log.
I was flying above grass, which makes the sensor behave like that. However I had flew on this location several times before without any issue and previous graphs were exactly like that. Something must have change in the code.
I will lower the RNGFND_MAX_CM Parameter to 250 and see if helps.
Regarding vibrations, I was trying to establish a baseline of values to debug a small tricopter ( quantum trifecta ) model which is challenging me in any way you can imagine. It is really difficult to assemble small drones…
How much variation in Z axis you consider to be a good target to archive? My props and motors are very well balanced and without any play.
Hello, I´ve just wanna report that in my flight today the problem was solved, however I had made several changes:
Lowered rngfnd_max_cm to 250
adjusted thr_min to 30
set blheli/escs to use oneshot
Everything is running smoothly, noticeable better than 3.3 release. Now I will try to raise rngfnd_max to 500 to see if it has the responsible for fixing the issue.