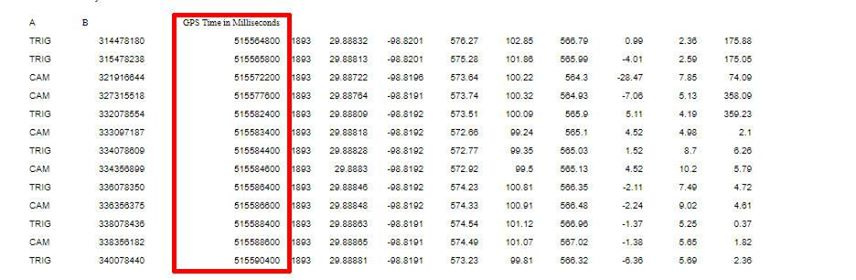
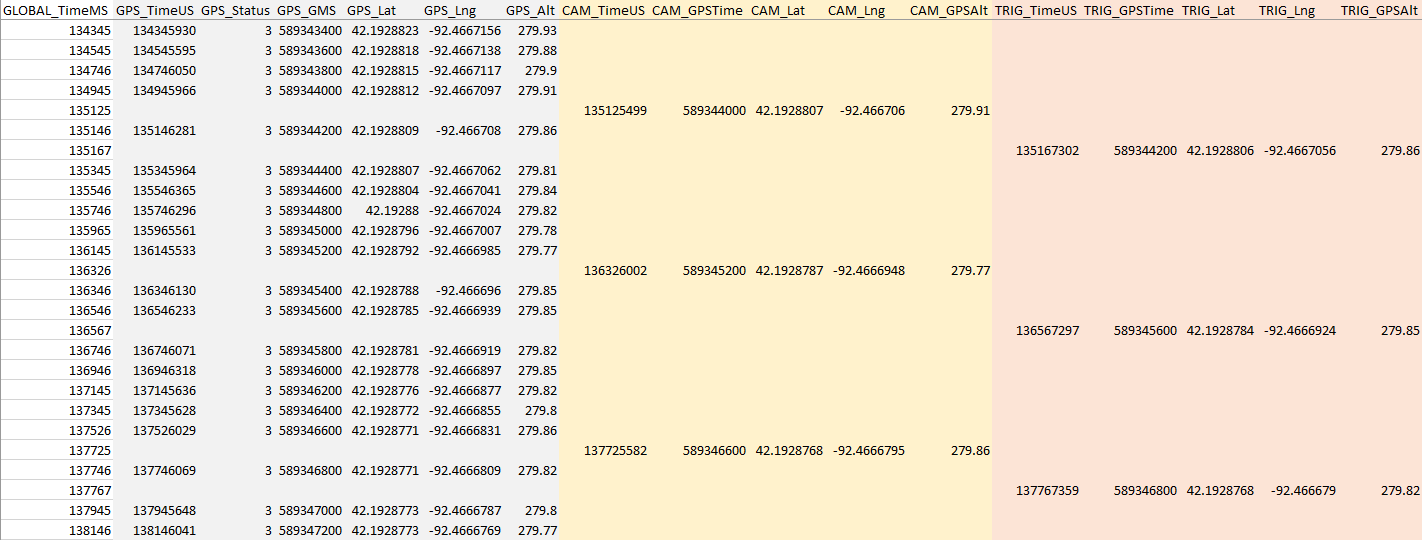
Will the fast port log the instantaneous timestamp from the system clock, or will it use the nearest GPS update timestamp? According the the following log reference, it’s still rounding the timestamp to the nearest 200ms. This isn’t my log though as I don’t have the equipment to test at the moment.
Sorry, @Naterater I don’t remember.
For geotagging your pictures to get faster photo alignment in Photoscan, Pix4D, etc. you don’t need more than MP and standard port for a standard GNSS. You can try hard to get the camera location error down, but it will not reduce pixel error as standard GNSS error will be an order of magnitude higher than what you get from a decent camera and accurate GCPs. You need PPK(or RTK) to reduce GCP count. As usual YMMV depending on what you really need.
That’s exactly what I want to do @ultrafuge, I have the Here+ reciever that can be log raw GPS data for PPK correction; HOWEVER, every “TRIG_GPS Time” is rounded to the previous GPS timestamp (not the exact GPS time). I would venture to assume that I need to correct this timestamp so it can be properly interpolated. Keep in mind that 200ms is about 30cm of distance for fixed-wing planes, and that is unaccpetable accuracy whent the GPS itself can do much better. Please see the attached screenshot of a CSV export of GPS, CAM, and TRIG messages from a simple walking test. You can see that the TimeUS resolution is 1ms, and it appears that it is accurate. The GPS timestamp is rounded to the previous GPS location and time though.
I never tried Here+, I made some flights using Emlid’s Reach module a year ago. If you are flying in an area with clear sky view and you are using a copter that stops for every picture it seems to work reliable. Flying fixed wing in a canyon is ofcourse another story. I would recommend using GCPs until you are confident your setup works 100%.
YES, I wrote my own program where I could adjust the delay as well when I played with M8N and got better results than with MP geotagging.
15 m/s * 200 ms = 15 * 0.2 = 3 m = 300 cm
Some things to consider if you want mm precision …
Here they say: ‘You will need to configure one of the AUX pins as a digital output/input, and connect it to the camera flash hot shoe (a universal camera hot shoe is required). The pin should be held for at least 2 milliseconds for reliable trigger detection.’
I don’t know if this means the port registers the leading edge of the hot shoe impuls or if it waits for at least 2ms and than registers the impuls ?
15 m/s * 2 ms = 15 * 0.002 = 0.03 m = 3 cm
If your camera is set to 1/1000, when does it trigger the hot shoe ? At the beginning, the middle or the end of the 1/1000 ?
15 m/s * 1/1000 = 15 * 0.001 = 0.015 m = 1.5 cm
How accurate can you measure the offset of camera and antenna ?
What is the delay of your GNSS ?
Don’t get me wrong, IMHO PPK is great for mapping areas where it is impossible to place GCPs.
1 Like