First of all, sorry if I’m posting this in wrong section. First time here. I also did post this in DIY Drones forum and don’t know how much time it takes for someone to answer. As I said, pretty new here.
Well yesterday I had a very odd crash. I wanted to testfly my Tarot 650. Note that I put on some align 1555 props which are basically bigger than tarot’s own 1555. Anyways, I re-calibrated everything and conducted a test flight in my backward in stabilize mode. Everything OK so I thought perfect.
I then took it to the field to take some shots and perform some testing as well.
Here’s were the problem started.
Took off in stabilize mode, switch to ALT HOLD and then to Loiter. Immediately, I saw that my quad was fighting a lot so I switched back to Stabilize and that’s when I lost control entirely. Smashed everything to the ground and the impact really messed it up.
I did download the log file and unfortunately, I don’t understand that much of it other than that it appears it has lost GPS signal.
This is my first crash in 2 years so I really don’t understand what happened.
I have of course taken the propellers off and made a test run on the bench and everything seems to work just fine. Have looked at the motor windings and such and everything works.
Never had this problem before changing to the Align props. Can it really be that the Align props are simply out of proportion for the quad. The story is that the holder which holds the folding props are different from Align vs Tarot, which is also clearly visible by when screwing them down, they look like they are like 17".
As I really want to learn, where can you see that it it motor2/ESC2/prop2?
Log File C:\Users\Amir Tahami\AppData\Local\Temp\tmpDB04.tmp.log
Size (kb) 5575.2109375
No of lines 68359
Duration 0:05:05
Vehicletype ArduCopter
Firmware Version V3.4.2
Firmware Hash 6076bdfc
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = NA -
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (18.11%)
Max mag field length (605.94) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERR found: CRASH
Test: GPS = FAIL - Min satellites: 0, Max HDop: 99.99
Test: IMU Mismatch = GOOD - (Mismatch: 0.18, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = FAIL - Motor channel averages = [1375, 1455, 1368, 1260]
Average motor output = 1364
Difference between min and max motor averages = 195
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = UNKNOWN - No CURR log data
Looks like I’m on 3.4.2. Apologies and therefore changed the title to 3.4.2
I don’t think this is the right log. It a very short flight and does not show any switching of modes and also the GPS has no fix as if your inside a building. You would not be able to switch to loiter with no GPS fix.
That’s the strange thing I noticed as well. It appears tjat there is no GPS signal, yet all the checking boxes are ticked in Mission Planner. I also got a green light from the pixhawk. It is my understanding that the green light will not come on unless you have 6 sats, or maybe I’m wrong.
The log indicates a crash and that there is something wrong with the roll, which ia consistent of how the quad went down.
Upon further checkings of esc and motor, they run all fine. I really think this is the log but again, as I’m kind of new in this I’ll check the logs again ahen I get back home from work.
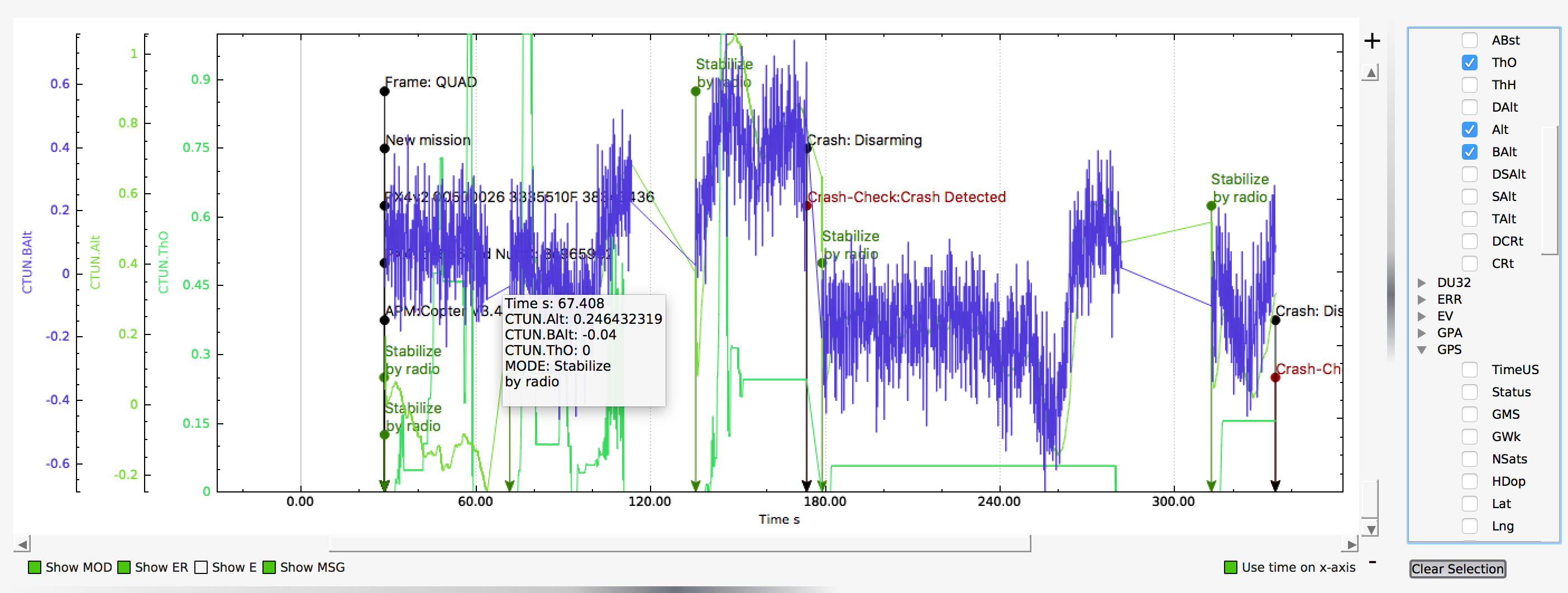
I think what is being considered is one of the last events, I didn’t consider it relevant, because it seems the “issue” is around the first crash check event